
El empleo de robots alimentados por baterías está medrando en aplicaciones como la automatización de factorías, la agricultura, la entrega a campus y usuarios y la administración de inventarios de guardes. Para conseguir el máximo tiempo de funcionamiento entre cargas, los diseñadores de estos sistemas de baterías siempre y en toda circunstancia han debido preocuparse por la eficacia de la conversión de la energía, como por el tamaño y el peso.
No obstante, estas preocupaciones se han vuelto más críticas conforme las capacidades de carga prosiguen incrementando y las peculiaridades de detección y seguridad, como la visión, el alcance, la cercanía y la localización, entre otras muchas, agregan dificultad al diseño y peso físico. Al tiempo, el procesamiento electrónico auxiliar requerido asimismo consume más energía.
Para aumentar al máximo la duración de la batería en frente de estos desafíos auxiliares, los diseñadores pueden recurrir a una arquitectura de suministro de energía distribuida basada en componentes para nutrir los motores, las CPU y otros subsistemas. En este enfoque, cada componente individual de conversión de energía CC-CC puede ponerse en el punto de carga (PoL) y optimarse para una alta eficacia, un tamaño pequeño (alta densidad de energía) y un desempeño general. Este enfoque puede dar sitio a un sistema de nutrición general más ligero, lo que deja acrecentar el desempeño de los sistemas robóticos alimentados por baterías. La flexibilidad asimismo aumenta, puesto que los componentes de conversión de energía pueden escalarse de manera fácil paralelamente conforme aumentan las demandas de energía robótica, y asimismo dejan desplegar exactamente la misma arquitectura de energía por medio de una plataforma de sistemas robóticos de múltiples tamaños.
Este artículo resume concisamente las necesidades de energía de múltiples aplicaciones de la robótica, incluyendo la cosecha agrícola, la entrega a los campus y a los usuarios, y el movimiento de inventario en los guardes. Ahora, examinará las ventajas de usar una arquitectura de suministro de energía distribuida basada en componentes, y después presentará soluciones de convertidores CC-CC de ejemplo de Vicor, así como tableros de evaluación y software asociado para asistir a los diseñadores a iniciar.
Requisitos de energía para los robots
Los requisitos de potencia para tipos concretos de robots están ciertos por la aplicación:
Robots de cosecha agrícola: Plantar, sostener y cosechar productos (frutas, verduras, granos) usando la guía de automóviles automatizada así como el reconocimiento visual y múltiples sensores de análisis del medioambiente y del suelo. Estos grandes automóviles robóticos se nutren típicamente de una fuente de alto voltaje de cuatrocientos voltios o bien más.
Robots de entrega: Usuarios de última milla o bien entrega de múltiples artículos en el campus. Si bien las cargas útiles cambian en tamaño y peso, estos robots acostumbran a marchar con baterías de cuarenta y ocho a cien voltios y tienen requisitos de tiempo de funcionamiento más largos que la clase de robots móviles de inventario de almacén.
Robots de movimiento de inventario del almacén: Dan labores de administración de inventario y cumplimiento de pedidos en grandes guardes. Esta clase de robot se nutre típicamente de una fuente de baterías de veinticuatro a setenta y dos voltios con una carga de ocasión efectuada conforme la necesidad.
Arquitecturas de energía distribuida basadas en componentes para la robótica
En esta sección se examinan 4 ejemplos de arquitecturas de energía distribuida basadas en componentes para robots que van desde un sistema de ciento cincuenta y nueve kilovatios (kW) para robots de cosecha agrícola con un bulto de baterías de setecientos sesenta voltios hasta un sistema de doce kW para robots de movimiento de inventario de almacén que emplean un bulto de baterías de cuarenta y ocho voltios. Una característica común en 3 de estas aplicaciones es un autobus primordial de voltaje parcialmente alto que distribuye la energía a través del robot, seguido de una o bien más secciones de reducción de voltaje que entregan la energía precisa a los subsistemas. Un autobus de distribución de energía de alto voltaje da como resultado una mayor eficacia y menores corrientes de distribución de energía, lo que deja el empleo de cables de energía más pequeños, más ligeros y menos costosos. La cuarta aplicación muestra la simplificación que puede resultar en robots más pequeños que usan sistemas de baterías de cuarenta y ocho voltios.
La red de suministro de energía (PDN) para los robots cosechadores agrícolas entiende un autobus de energía primordial de setecientos sesenta voltios (Figura 1). Esto se apoya en una serie de convertidores CC-CC apartados de relación fija (no regulados) (mostrados como módulos BCM a la izquierda) con un voltaje de salida de 1/16 del voltaje de entrada. Estos convertidores se emplean paralelamente, lo que deja redimensionar el sistema conforme las necesidades del diseño concreto.
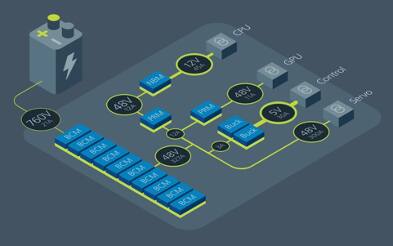
Más adelante en internet, una serie de convertidores de relación fija (NBM, superior media) y regulada reductor-ascensor (PRM, centro) y convertidores reductores (inferior) se nutren de corriente, raíles de menor voltaje conforme sea preciso. En este diseño, el servo es impulsado de forma directa desde el autobus de potencia intermedio de cuarenta y ocho voltios sin conversión auxiliar CC-CC.
La PDN para los robots de distribución de campus y de consumo muestra la simplificación que puede resultar en sistemas de potencia media al emplear un voltaje de autobus de potencia primordial más bajo (en un caso así, cien voltios), y al agregar regulación a los convertidores apartados CC-CC (DCM) en el autobus de distribución de potencia primordial para generar el voltaje de autobus intermedio de cuarenta y ocho voltios (Figura dos).
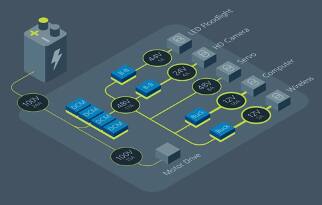
Este enfoque deja el empleo de convertidores CC-CC no apartados para nutrir los diferentes subsistemas. Además de esto, el empleo de un voltaje más bajo para el autobus de nutrición primordial deja que el motor de accionamiento se conecte de forma directa al autobus primordial, al tiempo que el servo puede conectarse de forma directa al autobus intermedio de cuarenta y ocho voltios. Los robots de entrega de campus y de consumo más pequeños pueden agregar un voltaje de autobus intermedio de veinticuatro voltios y servos de veinticuatro o bien cuarenta y ocho voltios, mas la arquitectura general es afín.
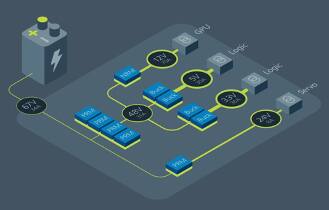
El PDN para los robots de almacén que emplean un bulto de baterías de sesenta y siete voltios resalta el empleo de convertidores CC-CC no apartados (PRM) en el autobus de nutrición primordial (Figura tres). Estos convertidores dan eficiencias del noventa y seis por ciento al noventa y ocho por ciento y pueden ser paralelos para necesidades de energía más altas. Esta arquitectura asimismo cuenta con un convertidor CC-CC no apartado de relación fija (NBM) para nutrir la GPU, y convertidores buck regulados no apartados que nutren las secciones lógicas.
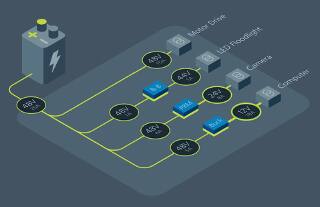
Para los diseños de robots más pequeños que usan una batería de cuarenta y ocho voltios no es preciso producir un voltaje de autobus intermedio, lo que facilita el diseño (Figura cuatro). Las cargas se nutren de forma directa del voltaje de la batería por conversión directa utilizando múltiples convertidores CC-CC no apartados. La supresión del autobus intermedio en el tren de potencia aumenta la eficacia del sistema y reduce el peso y el costo del sistema de potencia.
Consideraciones sobre el diseño de la arquitectura de energía distribuida
Como se muestra arriba, los diseñadores deben hacer numerosas elecciones de sistemas de energía para optimar una PDN basada en componentes para la robótica. No hay un enfoque de «talla única». Normalmente, los robots más grandes se favorecen de los mayores voltajes de las baterías, lo que puede dar sitio a una mayor eficacia en la distribución de la energía y a buses de distribución de energía más pequeños y ligeros.
El empleo de convertidores CC-CC apartados en frente de no apartados es una consideración esencial en el momento de optimar la eficacia global del sistema y disminuir al mínimo los costos. Cuanto más cerca esté el convertidor CC-CC de una carga de bajo voltaje, más probable es que la elección perfecta sea un componente de energía no apartado de menor costo, incrementando la eficacia general del PDN. Cuando sea apropiado, el empleo de convertidores CC-CC de relación fija (no regulados) de menor costo asimismo puede contribuir a una mayor eficacia de la PDN.
Vicor ofrece convertidores CC-CC capaces de satisfacer las necesidades de los diseñadores en una extensa gama de arquitecturas de suministro de energía distribuida basadas en componentes, incluyendo las 4 descritas previamente. La próxima discusión se centra en los dispositivos concretos que pueden emplearse en un sistema de suministro de energía afín al que se describe para los robots de suministro en el campus y para los usuarios, como se muestra en la figura dos.
Convertidores CC-CC para los sistemas de energía de los robots
El DCM3623TA5N53B4T70 es un caso de un convertidor DCM apartado y regulado que puede generar el voltaje del autobus intermedio de cuarenta y ocho voltios desde una batería de cien voltios (Figura cinco). Este convertidor usa la tecnología de conmutación de voltaje cero (ZVS) para ofrecer una eficacia máxima del novecientos siete por ciento y una densidad de potencia de seiscientos cincuenta y tres vatios por pulgada cúbica. Da un aislamiento de tres con cero voltios cc entre la entrada y la salida.

Aprovechando las ventajas térmicos y de densidad de la tecnología de empaquetamiento de ChiP de Vicor, el módulo DCM ofrece opciones flexibles de administración térmica con impedancias térmicas superiores y también inferiores bajísimas. Los componentes de energía basados en ChiP dejan a los diseñadores conseguir soluciones rentables para sistemas de energía con atributos de tamaño, peso y eficacia del sistema que ya antes eran inaccesibles, de forma veloz y previsible.
Para comenzar a explorar las capacidades del DCM3623TA5N53B4T70, los diseñadores pueden usar la tarjeta de evaluación DCM3623EA5N53B4T70 (Figura seis). La placa de evaluación DCM puede ser configurada para múltiples esquemas de habilitación y monitoreo de fallas, de esta forma para ejercer múltiples modos de recorte en dependencia de los requerimientos de la aplicación.
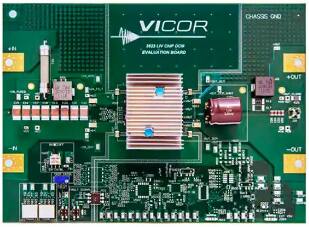
El DCM3623EA5N53B4T70 puede usarse para valorar los DCM en una configuración autónoma o bien como un conjunto de módulos. Asimismo apoya la evaluación de múltiples opciones de habilitación, recorte y monitoreo de fallas:
Habilitar opciones:
- Interruptor mecánico de a bordo (por defecto)
- Control externo
Opciones de recorte:
- Operación de ajuste fijo (por defecto): se deja que el pin TR flote en el arranque inicial.El DCM desactiva el recorte de salida y el recorte de salida se programa a la VOUT nominal.
- Operación de ajuste variable, resistencia variable integrado: El voltaje de la clavija de ajuste es ratiométrico, con un reóstato que trabaja contra una resistencia de pull-up en el DCM a VCC.
- Operación de ajuste variable, control fuera de la nave: El voltaje de la clavija de recorte se controla por medio de un control de programación externo, que se refiere al -IN de cada DCM concreto del sistema.
Opciones de monitorización de fallos:
- led de a bordo: la clavija de FT impulsa un led perceptible para la retroalimentación visual del estado de la falla.
- Optoacoplador integrado: la clavija FT impulsa un optoacoplador de a bordo para llevar el estado de la falla a través del límite de aislamiento primario-secundario.
El convertidor CC-CC PI3740-cero de Vicor puede usarse para generar energía de cuarenta y cuatro y veinticuatro voltios para proyectores led y cámaras de alta definición (HD), respectivamente. Es un convertidor ZVS de alta eficacia y extenso rango de entrada y salida. Este sistema en bulto de alta densidad (SiP) integra un supervisor, interruptores de nutrición y componentes de apoyo (Figura siete). Tiene una eficacia máxima de hasta el noventa y seis por ciento , como una buena eficacia en la carga de luz.

- El PI3740-cero requiere un inductor externo, un divisor resistivo y condensadores mínimos para formar un regulador reductor-ascensor completo. La frecuencia de conmutación de 1 megahercio (MHz) reduce el tamaño de los componentes de filtrado externos, mejora la densidad de potencia y deja una veloz contestación activa a los transitorios de línea y carga.Para arrancar el diseño con el PI3740-cero, Vicor da el PI3740-cero-EVAL1 para valorar el PI3740-cero en aplicaciones de voltaje incesante donde el VOUT está sobre los ocho voltios. La placa marcha con un voltaje de entrada de entre ocho y sesenta voltios cc y aguanta voltajes de salida de hasta cincuenta voltios cc. Las peculiaridades de esta placa de evaluación incluyen:
- Llaves de entrada y salida para las conexiones de fuente y carga
- Sitio para poner un condensador electrolítico de aluminio de entrada de orificio pasante
- Filtro de la fuente de entrada
- Toma de sonda de osciloscopio para mediciones precisas de alta frecuencia de salida y voltaje de entrada
- Los puntos de prueba de las clavijas de señal y los conectores de los cables
- Puntos de prueba de voltaje Kelvin y enchufes para todos y cada uno de los pines del PI3740
- Detección de corriente de lado alto/bajo seleccionable por jumper
- Voltaje de flotación seleccionable por el puente
Para finalizar, el regulador PI3526-cero-LGIZ de Vicor puede emplearse para otorgar una nutrición de doce voltios a una computadora y a los subsistemas inalámbricos del PDN (Figura ocho). Este convertidor CC-CC da una eficacia de hasta el noventa y ocho por ciento , y soporte para el arranque suave y el seguimiento graduable por el usuario que incluye capacidades de límite de corriente veloces y lentas. Estos reguladores ZVS integran el supervisor, los interruptores de potencia y los componentes de apoyo en una configuración SiP.

La placa de evaluación PI3526-cero-EVAL1 de Vicor puede ser configurado para probar con el regulador buck PI3526-cero-LGIZ en una configuración autónoma o bien de sentido recóndito. Se dan enchufes para permitir una veloz sonda y la colocación de un condensador de entrada masiva. La placa de evaluación da orejetas, huellas de la capa inferior del conector tipo banana para las conexiones de entrada y salida, conectores de señal y puntos de prueba, y conectores Kelvin Johnson-Jacks para mediciones precisas del voltaje del nodo de energía.
Conclusión
Las necesidades de conversión de la energía de los sistemas robóticos se vuelven más desafiantes conforme las capacidades de carga, el reconocimiento visual y la funcionalidad del usuario aumentan la dificultad de los robots. Las soluciones de energía existentes pueden padecer restricciones de desempeño en concepto de tamaño, eficacia, peso y escalabilidad, lo que las hace menos convenientes para las aplicaciones de robótica. Para las aplicaciones de robótica, los diseñadores pueden recurrir a arquitecturas de suministro de energía distribuida basadas en componentes para nutrir los motores, las CPU y otros sistemas.
Como se muestra, este enfoque puede dar sitio a un sistema de energía más ligero, lo que deja un mayor desempeño de la robótica de baterías. La flexibilidad asimismo aumenta, en tanto que los componentes de conversión de energía se pueden escalar de forma fácil paralelamente conforme aumenta la demanda de energía, lo que deja desplegar exactamente la misma arquitectura de energía mediante una plataforma de sistemas robóticos de múltiples tamaños.





