
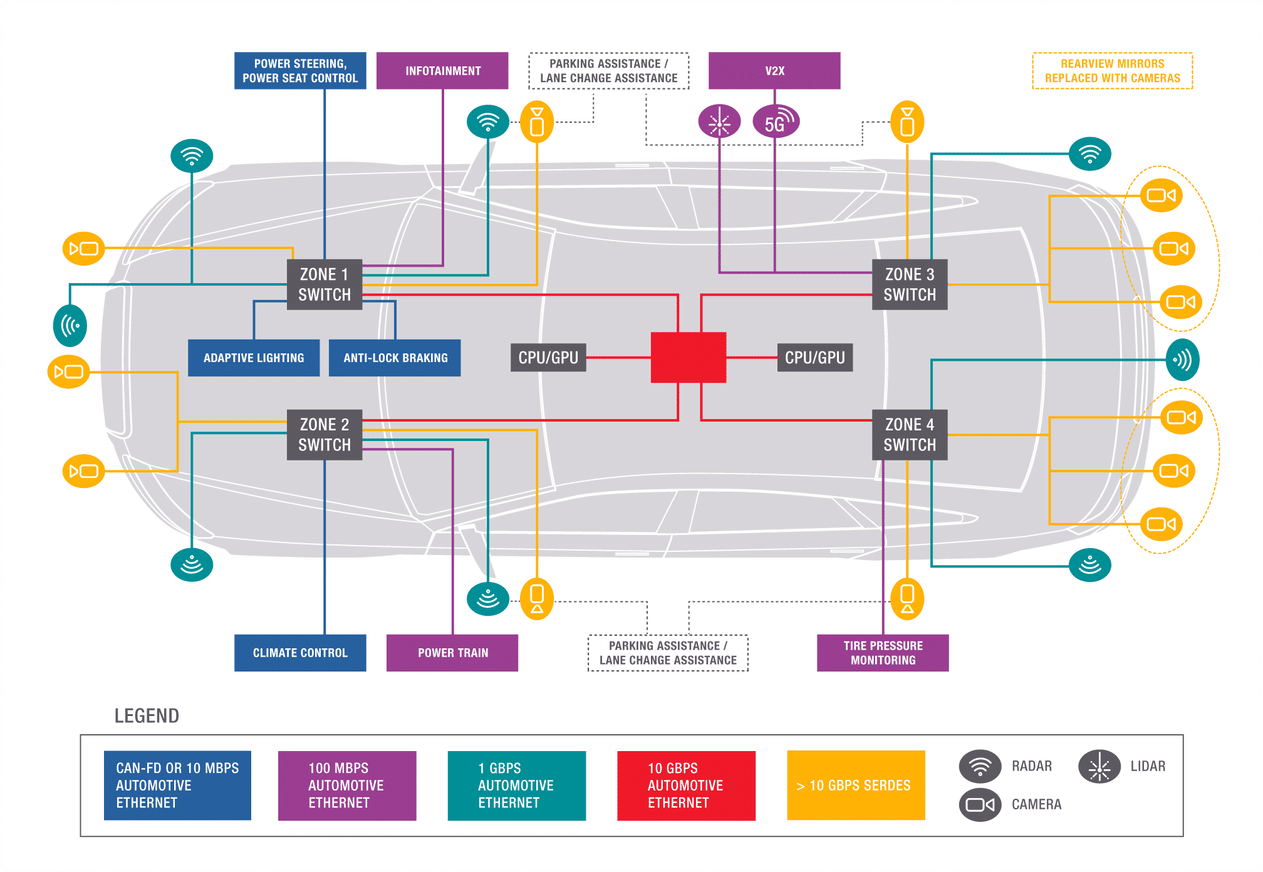
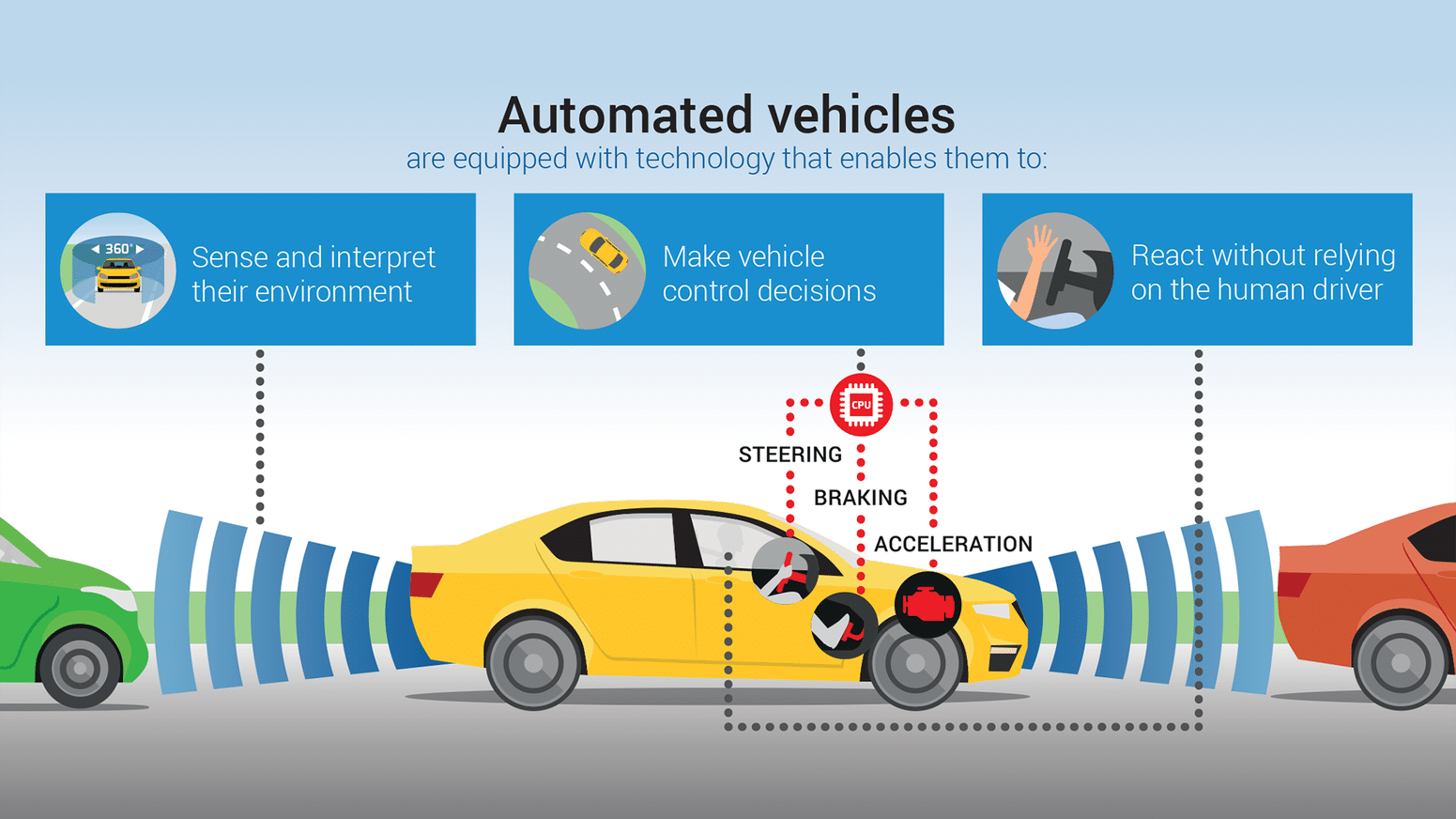
Los vehículos están avanzando de Nivel dos a Niveles tres y cuatro de automatización. Esto incluye una gama de componentes como Unidades de Control de Dominio (DCU), Unidades de Control Electrónico (ECU), Unidades de Procesado de Gráficos (GPU), cámaras de alta definición, sensores, y dispositivos de almacenaje para sistemas avanzados de ayuda a la conducción (ADAS), conectividad, y navegación. Además de esto, incluyen electrónica para el control del sistema de transmisión, chasis, cuerpo y funciones confort, interfaz humano-máquina, como infoentretenimiento. La red interna del vehículo (IVN) y el cableado asociado para conectar esta funcionalidad es el tercer componente de mayor peso y el tercero más costoso, solo superado por el chasis y por el motor.
En dos mil cuatro, seguramente esto no estaba en la psique de Thomas Konigseder. Thomas era un Ingeniero en Electrónica y Directivo de Conjunto en BMW y estaba procurando solucionar un inconveniente básico; localizar una forma de apresurar el proceso de programación flash en los vehículos BMW. Si usaba la interfaz CAN (Controller Área Network), volcar 1 GB de software llevaría múltiples horas. Tras mucho valorar la situación y cooperando con partners en semiconductores, Thomas eligió el estándar 100Base-TX Ethernet, y en dos mil ocho el BMW serie siete fue el primer vehículo de fabricación en serie con interfaz Ethernet.
Aun tras la resolución de Thomas, los fabricantes de automoción tardaron un tiempo en migrar del empleo de Ethernet solamente para descargas de software y diagnóstico a bordo cuando el vehículo está aparcado a emplear Ethernet para comunicaciones internas del vehículo mientras que está en movimiento. Las preocupaciones centradas en Interferencia y Compatibilidad Electromagnéticas (EMI/EMC), latencia, y la vulnerabilidad de Ethernet a ataques y manipulaciones que comprometan las ECU; puertos no utilizados; y también interfaces externas como móviles, Wi-Fi, Bluetooth, y diagnosis.
Diseño y Prueba de Ethernet de Automoción
Por estas razones, las pruebas de cumplimiento y de conformidad son críticas en Ethernet de automoción. Las pruebas deberían incluir:
• Pruebas de cumplimiento en transceptor, receptor, y link
• Pruebas de conformidad, integración, validación de protocolo, y desempeño
• Pruebas de seguridad que incluyan la conexión con el dispositivo por medio de sus interfaces, simulando ataques mediante software, pruebas de regresión, y pruebas de fuzz

La Necesidad de Ethernet de Automoción Multi-Gig
El creciente número de aplicaciones de automoción actuales prosigue demandando el aumento de ancho de banda y de otros requerimientos para el IVN. Ethernet cumplirá con estos requerimientos, pues la tecnología Ethernet y la estandarización prosigue evolucionando para los vehículos. Lo que comenzó como una solución para la línea de gran lujo de BMW, está en nuestros días en la mayor parte de los automóviles.
En verdad, en conversaciones con fabricantes de vehículos, mientan que están valorando la próxima versión de Ethernet de automoción, como por poner un ejemplo Multi-Gig Ethernet (dos.5Gbps a 10Gbps) debido a la creciente demanda de ancho de banda para:
-
- El creciente número de sensores ADAS como por poner un ejemplo cámaras, que pasa de unas diez a dos o bien más para los Niveles tres y cuatro de automatización
- Los requisitos de datos en crudo sin comprimir provenientes de las cámaras (la compresión acarrea pérdida de calidad de imagen y también acrecienta la latencia, encareciendo los sensores y también acrecentando su temperatura)
- El aumento de la resolución de cada cámara de 720p a 1080p o bien aun 4K
- El aumento de imágenes por Segundo de treinta a sesenta
- El aumento de profundidad de color de ocho a dieciseis, dos, e inclusive dos-bits/píxel
Con determinación 4K y profundidad de color mayor de ocho-bit, va a ser imperativo el empleo de Multi-Gig Ethernet;
Como muestra la próxima tabla:
| Hres | Vres | Frames/seg | 8-bit | 12-bit | 16-bit | 20-bit | 24-bit |
| 3840 | 2160 | 30 | 1.99Gbps | 2.99Gbps | 3.98Gbps | 4.98Gbps | 5.97Gbps |
| 3840 | 2160 | 60 | 3.98Gbps | 5.97Gbps | 7.96Gbps | 9.95Gbps | 11.95Gbps |
Sensores, Redes Internas del Vehículo, y Conducción Autónoma en Europa
En el mercado europeo, la industria de la automoción representa más del siete por ciento del Producto Interior Bruto, y Europa es con diferencia el mayor inversor en I+D de automoción a nivel mundial:
| Inversión Anual Europea en I+D de Automoción | % de I+D en Automoción con respecto al gasto total de I+D Europeo |
| 61 mil millones de euros | 28% |
Europa asimismo lidera el número de patentes en automoción. Desde dos mil once, más del treinta y siete por ciento de todas y cada una de las patentes son Europeas (el treinta y cuatro por ciento son O bien.S.; el trece por ciento Japonesas; y el tres por ciento Chinas) – (Asociación Europea de Fabricantes de Vehículos).
Un buen proyecto para estar al corriente de los requisitos de sensores y de IVN en el mercado de automoción es el proyecto europeo de tres años y cincuenta y uno millones de euros llamado PRYSTINE:
El proyecto recibió fondos del programa europeo de Investigación y también Innovación Horizonte dos mil veinte, engloba sesenta partners incluyendo los fabricantes de coches: BMW, Ford, y Maserati; y las compañías de semiconductores: Infineon Technologies y NXP Semiconductors. El proyecto aprovecha la fusión de sensores radar y lidar, la integración de procesado de señal, y también IA para habilitar la conducción autónoma segura en escenarios de tráfico complejo tanto en ambientes urbanos como rurales.
La meta final es la evolución de los sistemas fail-safe a los fail-operational, y prosperar la seguridad de todos y cada uno de los componentes integrados en los futuros vehículos como controladores de seguridad, sensores, radar, lidar, cámaras, y plataformas de computación.
Fuente: Asociación Europea de Fabricantes de Vehículos
En Europa, el veintidos por ciento de las muertes en carretera implica a viandantes y el ocho por ciento a corredores. Las soluciones desarrolladas por los fabricantes de PRYSTINE usarán procesado de imagen en trescientos sesenta grados con cámaras de ambiente para suprimir los puntos ciegos a fin de que los usuarios frágiles de la carretera puedan ser vistos aun antes que entren en el campo natural de visión del conductor. Además de esto, las soluciones van a ofrecer alarmas de seguridad que reducirán los accidentes en carretera y van a mejorar la percepción del conductor. Las soluciones de administración de tráfico fusionarán información procedente de controladores de tráfico, datos de automóviles, y datos de cámaras de identificación de matrículas.
Todos estos datos deberán ser transferidos por redes de gran velocidad, alto ancho de banda y baja latencia, y es acá donde los estándares como Multi-Gig Ethernet son vitales.
Pensamientos Finales
Warren Bennis, autoridad reconocida universalmente en liderazgo de mercado acostumbraba a decir: “La factoría del futuro solo va a tener 2 empleados, un hombre y un cánido. El hombre va a estar allá para nutrir al cánido. El cánido va a estar allá para eludir que el hombre toque los equipos.”
Warren podría haber dicho algo afín con respecto al vehículo del futuro: “Sólo va a tener 3 entidades, una persona, ADAS, y Multi-Gig Ethernet. La persona va a estar para encender el ADAS. El ADAS va a estar para eludir que la persona conduzca el vehículo. Y Multi-Gig Ethernet va a estar para conectar el ADAS.”
Para más información de tecnología de red en el vehículo, visite: https://www.keysight.com/find/automotive-ethernet.
Sobre el Autor
Alan A. Varghese es responsable del Mercado y la Tecnología de Automoción en Keysight Technologies.
De antemano a Keysight, Alan sirvió como Analista Tecnológico y de Industria cubriendo mercados de Wireless, IoT, Automoción, Semiconductores, Cable y Óptica, Imagen y Vídeo, Inteligencia Artificial y Aprendizaje de Máquinas. Ha dado consejo a empresas sobre estrategias y planes de desarrollo, efectuó investigación especializada de mercado y tecnología, SWOT y análisis de modelos de negocio. Comenzó su Carrera como ingeniero de procesado digital de señal trabajando en modems, tiene un MSEE en Comunicaciones Inalámbricas y en Procesado Digital de la Señal por el Instituto Politécnico Rensselaer, en Troy, N. York.





