Muchas aplicaciones de automatización industrial (AI) requieren la capacidad de advertir la presencia y/o la situación de un objeto o bien persona sin establecer contacto físico para eludir limitar o bien limitar el movimiento del objeto detectado. El sensor de cercanía es ideal para esta función. Mas los sensores de cercanía son variadísimos, como los imantados, los capacitivos, los inductivos y los ópticos, y la composición del material del objeto que se advierte puede afectar a la capacidad de un sensor para advertir su presencia.
Ciertos sensores de cercanía son útiles para advertir metales ferrosos, al tiempo que otros pueden advertir cualquier clase de metal, y otros pueden advertir cualquier género de objeto e inclusive personas. Los usuarios potenciales de los sensores de cercanía en una aplicación de AI deben conocer los diferentes géneros de tecnología de sensores de cercanía y su aplicabilidad a situaciones de detección concretas.
En el presente artículo se examinan múltiples géneros de sensores y se especifican los modelos de objetos que pueden advertir y la sensibilidad espacial de cada género de dispositivo. Dispositivos de muestra de Texas Instruments, Red Lion Controls, Littelfuse Inc. , Omron Electronics Inc., MaxBotix Inc. y Carlo Gavazzi Inc. se usan como ejemplo.
Sensores de cercanía inductivos
Los sensores de cercanía inductivos advierten la presencia de objetos conductores (o sea, metálicos) y tienen un rango de detección que depende del género de metal detectado. Estos sensores marchan con un campo imantado de alta frecuencia generado por una bobina en un circuito de oscilación. Un propósito conductor que se aproxima al campo imantado tiene una inducción o bien corriente de Foucault inducida en él, creando un campo imantado opuesto que reduce ciertamente la inductancia del sensor inductivo.
Los sensores de cercanía inductivos marchan a través de 2 métodos. En el primer procedimiento operativo, conforme la meta se aproxima al sensor, el flujo de corriente de inducción aumenta, lo que acrecienta la carga en el circuito de oscilación haciendo que su oscilación se mitigue o bien se detenga. El sensor advierte este cambio en el estado de oscilación con un circuito de detección de amplitud y emite una señal de detección.
Un esquema de funcionamiento alternativo usa un cambio en la frecuencia -en vez de la amplitud- de la oscilación resultante de la presencia de un fin conductor. Un fin de metal no ferroso, como el aluminio o bien el cobre, que se aproxima al sensor hace que la frecuencia de oscilación aumente, al paso que un fin de metal ferroso, como el hierro o bien el acero, hace que la frecuencia de oscilación reduzca. El cambio de la frecuencia de oscilación respecto a una frecuencia de referencia hace que el estado de salida del sensor cambie.
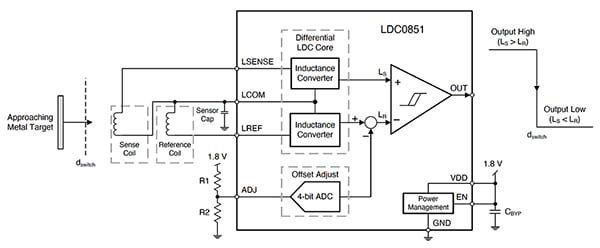
El LDC0851HDSGT de Texas Instruments es un caso de sensor de cercanía inductivo de corto alcance que usa la alteración de frecuencia para advertir la presencia de un objeto conductor en su campo electromagnético (Figura 1).
Figura 1. El sensor de proximidad inductivo LDC0851HDSGT utiliza dos bobinas inductivas -una de detección y otra de referencia- para medir la diferencia de inductancia debida a un objeto cercano a la bobina de detección. (Fuente de la imagen: Texas Instruments).
El interruptor de cercanía inductivo LDC0851 es ideal para aplicaciones de detección de cercanía sin contacto, como la detección de presencia, el recuento de acontecimientos y los pulsadores simples en los que el rango de detección es inferior a diez milímetros (0.39 pulgadas). El dispositivo cambia su estado de salida en el momento en que un objeto conductor se mueve cerca de la bobina de detección. La implementación diferencial (el empleo de una bobina de detección y otra de referencia para determinar la inductancia relativa del sistema) y la histéresis, se emplean para asegurar una conmutación fiable y también inmune a las vibraciones mecánicas, las alteraciones de temperatura o bien los efectos de la humedad.
Las bobinas de captación inductiva del LDC0851HDSGT se sintonizan con un solo condensador sensor, que establece la frecuencia de oscilación en el rango de tres a diecinueve megahercios (MHz). La salida push-pull está en estado bajo cuando la inductancia de detección está bajo la inductancia de referencia y vuelve al estado alto cuando ocurre lo opuesto.
Sensores imantados de cercanía
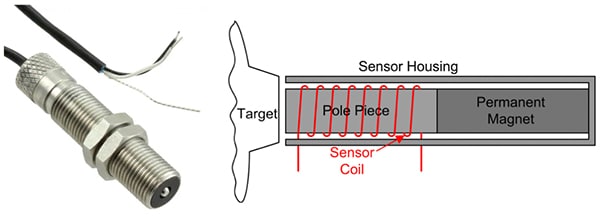
Usados para medir la situación y la velocidad de componentes metálicos en movimiento, los detectores de cercanía imantados pueden ser dispositivos activos, como un sensor de efecto Hall, o bien pasivos, como un sensor de reluctancia variable (VR), como el captador imantado roscado MP62TA00 de Red Lion Controls (figura dos, izquierda). El sensor de cercanía VR mide los cambios en la reluctancia imantada -que es equivalente a la resistencia eléctrica en un circuito eléctrico- y consta de un imán permanente, una pieza polar y una bobina de detección encerrada en una caja cilíndrica.
Figura 2. El captador magnético VR (izquierda) es un sensor pasivo que detecta el cambio del campo magnético entre la pieza polar y la carcasa del sensor (mostrada a la derecha). (Fuentes de la imagen: Art Pini, con la imagen MP62TA00 de Red Lion Controls).
Un objeto ferromagnético que pasa cerca del polo provoca una alteración del campo imantado. Esta alteración produce por su parte una tensión de señal en la bobina de señal. La magnitud de la tensión de la señal depende del tamaño del objeto objetivo, de su velocidad y del tamaño del hueco entre la pieza polar y el objeto. El objeto objetivo ha de estar en movimiento para ser detectado por el SRV. El captador imantado roscado MP62TA00 es un sensor VR de cercanía encapsulado en epoxi con un rango de temperatura de funcionamiento de -cuarenta a +107 °C. Tiene una longitud de una pulgada (veinticinco.4 milímetros (mm)) con un cuerpo roscado de ¼ – cuarenta UNS.
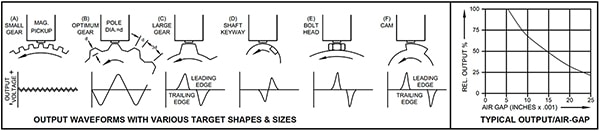
Los sensores de RV son dispositivos pasivos, con lo que no precisan una fuente de nutrición. Por este motivo, acostumbran a tener aplicación en la medición de máquinas rotativas. Por poner un ejemplo, los captadores VR como el MP62TA00 se usan extensamente para advertir el paso de los dientes en un engranaje ferroso, una rueda dentada o bien una rueda de la correa de distribución. Asimismo pueden usarse para advertir cabezas de tornillos, chavetas o bien otros objetivos metálicos de movimiento veloz (figura tres).
Figura 3. Los sensores de RV se utilizan ampliamente para detectar los dientes de los engranajes, las levas y los chaveteros en la maquinaria rotativa. (Fuente de la imagen: Red Lion Controls).
Se emplean como tacómetros para medir la velocidad de rotación y asimismo se aplican por parejas para medir la excentricidad del eje giratorio.
El segundo género de sensor imantado usa el efecto Hall para advertir la presencia de un campo imantado. El efecto Hall describe la interacción de un conductor portador de corriente y un campo imantado perpendicular al plano del conductor. En el momento en que un conductor portador de corriente se pone en un campo imantado, se produce una tensión (tensión Hall) perpendicular a la corriente y al campo. La tensión Hall es proporcional a la densidad de flujo del campo imantado y requiere un blanco que esté magnetizado.
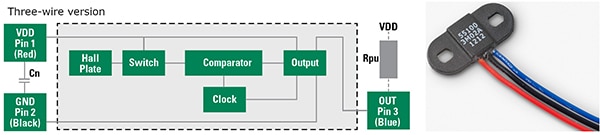
El cincuenta y 5 mil cien-3H-dos-A de Littelfuse Inc. es un sensor de efecto Hall de montaje en rienda que está libre con una salida digital o bien una salida de tensión analógica programable (Figura cuatro).
Figura 4. Diagrama de bloques y foto del sensor de proximidad de efecto Hall con brida 55100-3H-02-A con salida de tensión. (Fuente de la imagen: Littelfuse Inc.).
El cincuenta y 5 mil cien-3H-dos-A mide veinticinco.5 x once x tres mm y está libre con una salida de tensión de 3 hilos o bien una salida de corriente de 2 hilos. Cualquiera de las 2 versiones ofrece sensibilidad media (diez Gauss), alta (cincuenta y nueve Gauss) o bien programable. El dispositivo tiene una alta sensibilidad y un rango de activación de dieciocho mm (0.709 pulgadas) usando un imán concreto. La salida de pulldown puede absorber hasta veinticuatro voltios CC y veinte miliamperios (mA).cinco
Este sensor puede marchar a velocidades de conmutación de hasta diez kilohercios (kHz) y puede advertir campos imantados tanto activos como estáticos. La capacidad de advertir campos imantados estáticos es una de las primordiales ventajas del sensor de efecto Hall, en tanto que puede emplearse para advertir una puerta cerrada o bien un objeto en una situación fija.
Sensor óptico de cercanía
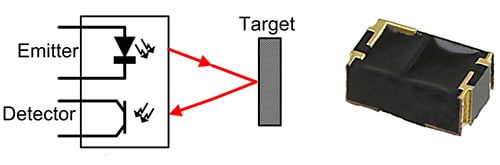
Los sensores ópticos de cercanía emplean luz -infrarroja o bien perceptible- para advertir objetos. Tienen el beneficio de que no es preciso que el propósito sea imantado o bien metálico, solo debe de obstruir o bien reflejar la luz. Esencialmente, los sensores ópticos emiten luz y controlan la luz reflejada en el objeto objetivo (Figura cinco, izquierda).
El EE-SY1200 de Omron Electronics Inc. es buen ejemplo de sensor óptico de cercanía (Figura cinco, derecha). Se trata de un fotosensor ultracompacto montado en una pequeña placa de circuito impreso que marcha a una longitud de onda infrarroja de ochocientos cincuenta nanómetros (nm). Se compone de un transmisor led y dos fototransistores en un encapsulado de montaje superficial con unas dimensiones de diecinueve x tres.2 x once mm (0.0748 x 0.126 x 0.043 pulgadas), que marcha en un rango de temperatura de -veinticinco a +85 °C. Su rango de distancia de detección recomendado es de diez a cuatro.0 mm (0.039 a 0.157 pulgadas).
Figura 5. El sensor óptico de proximidad localiza el objeto objetivo emitiendo un haz de luz y detectando el reflejo en el mismo. (Fuente de la imagen: Art Pini).
Su pequeño tamaño de montaje a bordo lo hace ideal para aplicaciones como la alineación de material mylar metalizado en una máquina envolvedora automática.
Sensores de cercanía ultrasónicos
Los requisitos de distancias de detección mayores, como la detección de turismos en una ventana de autoservicio, pueden manejarse con sensores de cercanía basados en ultrasonidos. Estos sensores advierten objetos de cualquier clase a distancias de hasta múltiples metros (m). La base de la medición es el tiempo de vuelo de un impulso ultrasónico emitido por el transmisor del sensor que se refleja en el objeto objetivo y es captado por el receptor del sensor (figura seis).
Figura 6. La localización del alcance mediante ultrasonidos mide el tiempo transcurrido desde la ráfaga ultrasónica del transmisor (izquierda) hasta el tiempo de llegada del pulso reflejado (derecha). Este tiempo es el doble del tiempo de vuelo de la ráfaga inicial desde el sensor hasta el objeto objetivo. (Fuente de la imagen: Art Pini).
El tiempo que transcurre desde el impulso trasmitido hasta el reflejo recibido representa el tiempo de vuelo desde el sensor hasta el objeto objetivo y de vuelta. Conociendo la velocidad de propagación y el tiempo de vuelo, se puede calcular la distancia. En el ejemplo mostrado, el tiempo de vuelo es de tres.1 milisegundos (ms). En el caso del aire, a setenta °F la velocidad del sonido es de mil ciento veintiocho pies por segundo, con lo que la distancia total hasta el objeto y de vuelta es de tres.96 pies. El alcance del sensor al objeto es la mitad del tiempo de vuelo o bien ciento noventa y ocho pies.
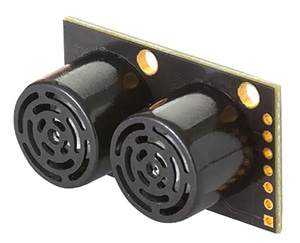
El MB1634-cero de MatBotix Inc. es un sensor de cercanía ultrasónico con un rango de medición de cinco m (ciento sesenta y cuatro pies). Requiere una fuente de nutrición de dos.5 a cinco.5 voltios. Marchando a una frecuencia de cuarenta y dos kHz, emite el rango al objetivo como un voltaje analógico, un ancho de pulso o bien un flujo de datos en serie con lógica de transistores (TTL). Cuenta con compensación de la alteración del tamaño del objetivo, de la tensión de funcionamiento y de la temperatura interna (compensación opcional de la temperatura externa), todo ello en un bulto de menos de una pulgada cúbica: veintidos y veintitres x treinta y ocho y cinco x catorce y setenta y tres mm (0.875 x mil cuatrocientos noventa y ocho x 0.58 pulgadas) (Figura siete).
Figura 7. El MB1634-000 es un conjunto de telémetro ultrasónico con transductores de emisión y recepción y un alcance de 5 m. (Fuente de la imagen: MaxBotix Inc.).
Sensores de cercanía capacitivos
Los sensores de cercanía capacitivos pueden advertir objetivos metálicos y no metálicos en forma de polvo, granulado, líquido y sólido. Un buen ejemplo es el CD50CNF06NO de Carlo Gavazzi (Figura ocho). Los dispositivos son en general afines a los sensores inductivos, salvo que las bobinas de detección del sensor inductivo se reemplazan por una placa de detección capacitiva. Se usan sobre todo para advertir los niveles de líquido en los depósitos de almacenaje.
La placa sensora del sensor forma un condensador con el objeto objetivo y la capacitancia cambia con la distancia al objeto. La capacitancia de detección determina la frecuencia del oscilador, que se controla para conmutar el estado de salida cuando se cruza un umbral de frecuencia.
El CD50CNF06N0 está destinado a supervisar los niveles de líquido. Es un sensor de 3 hilos con un transistor NPN de recolector abierto configurado en modo en general abierto. Requiere una fuente de nutrición de diez a treinta voltios CC. Se presenta en un bulto de cincuenta x treinta x siete mm (ciento noventa y siete x ciento dieciocho x 0.28 pulgadas) y tiene un rango de detección de seis mm (0.24 pulgadas). En su aplicación normal de detección de nivel, se atornilla o bien queja al exterior de un depósito no metálico.
Conclusión
Los sensores de cercanía emplean múltiples tecnologías que se amoldan a diferentes aplicaciones. En dependencia del género de sensor, pueden advertir objetivos metálicos y no metálicos con una distancia de detección que va desde milímetros hasta 5 o bien más metros. Son suficientemente compactas para marchar en espacios reducidos y muchas son capaces de marchar en ambientes bastante difíciles. Esta gama de tecnologías ofrece al usuario una enorme pluralidad de opciones para satisfacer un sinnúmero de requisitos de detección de cercanía.
Para ofrecer las mejores experiencias, utilizamos tecnologías como las cookies para almacenar y/o acceder a la información del dispositivo. El consentimiento de estas tecnologías nos permitirá procesar datos como el comportamiento de navegación o las identificaciones únicas en este sitio. No consentir o retirar el consentimiento, puede afectar negativamente a ciertas características y funciones.
Funcional
Siempre activo
El almacenamiento o acceso técnico es estrictamente necesario para el propósito legítimo de permitir el uso de un servicio específico explícitamente solicitado por el abonado o usuario, o con el único propósito de llevar a cabo la transmisión de una comunicación a través de una red de comunicaciones electrónicas.
Preferencias
El almacenamiento o acceso técnico es necesario para la finalidad legítima de almacenar preferencias no solicitadas por el abonado o usuario.
Estadísticas
El almacenamiento o acceso técnico que es utilizado exclusivamente con fines estadísticos.El almacenamiento o acceso técnico que se utiliza exclusivamente con fines estadísticos anónimos. Sin un requerimiento, el cumplimiento voluntario por parte de tu Proveedor de servicios de Internet, o los registros adicionales de un tercero, la información almacenada o recuperada sólo para este propósito no se puede utilizar para identificarte.
Marketing
El almacenamiento o acceso técnico es necesario para crear perfiles de usuario para enviar publicidad, o para rastrear al usuario en una web o en varias web con fines de marketing similares.