
Autor: Sam Gold, Senior Manager, Automotive Business Unit, Renesas Electronics Europe
Introducción
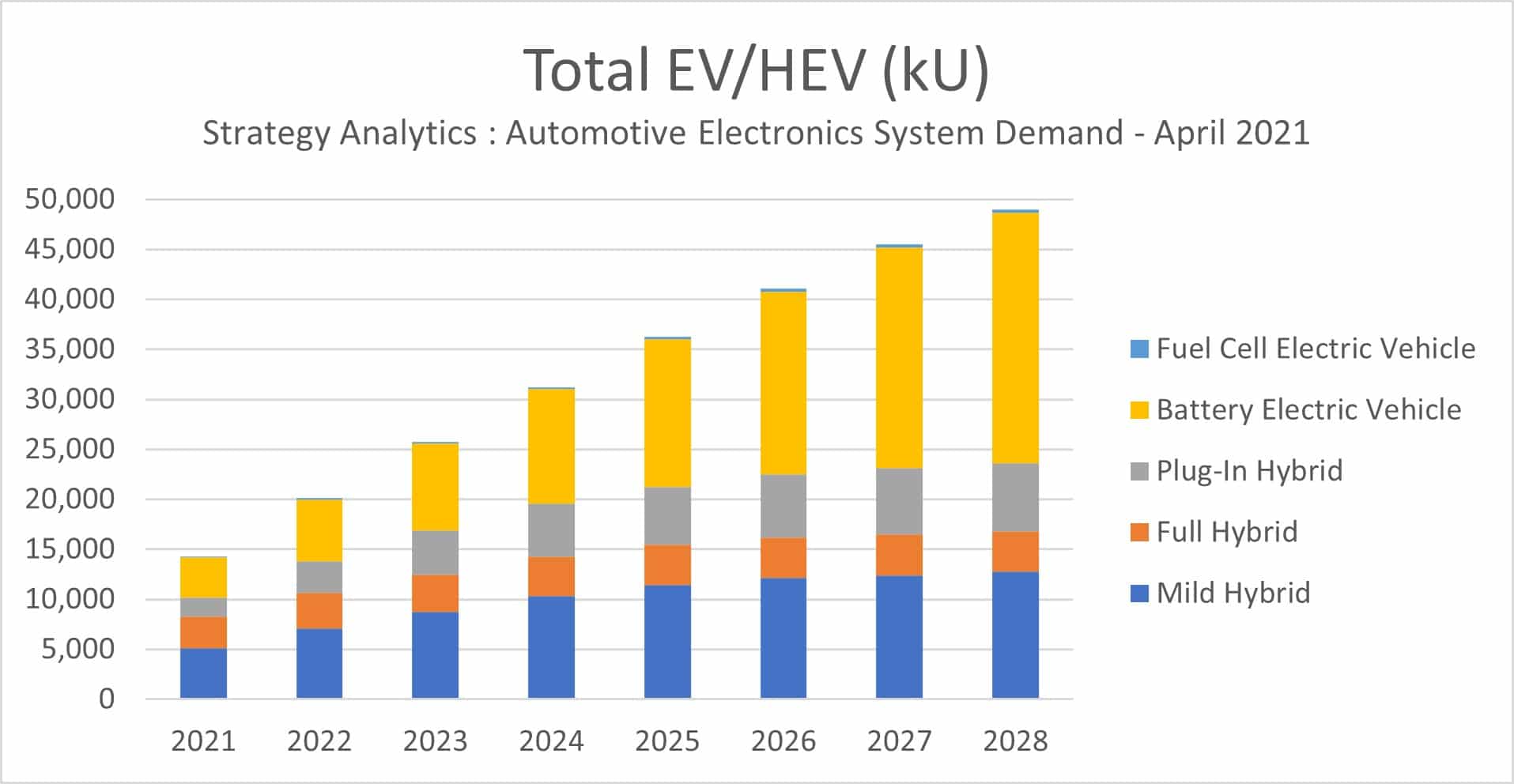
La tendencia de electrificación automotriz para acelerar el cambio global en curso hacia la neutralidad de carbono ha aumentado exponencialmente en los últimos tiempos. La penetración de los vehículos xEV está avanzando junto con regulaciones ambientales más estrictas, innovaciones tecnológicas centralizadas y costos decrecientes.
Casi todas las regiones del mundo se esfuerzan por lograr regulaciones ambientales más estrictas, donde Europa es líder, mientras que los estándares de gases de efecto invernadero (GEI) en otras regiones los siguen de cerca. Como factor influyente adicional, se pueden esperar estándares de emisión de GEI más estrictos, especialmente para los Estados Unidos, ahora bajo una nueva administración, lo que puede conducir a un crecimiento revitalizado especialmente para HEV, porque esta categoría de vehículos podría actuar como una solución disponible temprana en la fase de transición. hacia BEV. Los híbridos medios (sistemas de 48V), aunque contribuyen a cumplir con los nuevos estándares de GEI, no serán suficientes desde el punto de vista de los OEM para evitar multas resultantes de no cumplir con las regulaciones de emisiones de Co2 de los respectivos países.
A medida que esta tendencia de GEI se está acelerando, las expectativas son que el mercado mundial de xEV podría estar entrando en un período de expansión prolongada, y los costos de las baterías también seguirán la tendencia a la baja. Las restricciones más estrictas (estándares de ahorro de combustible / regulaciones de ventas de BEV) en todos los países crearán demanda hasta alrededor de 2025, seguido de una transición a un patrón de crecimiento independiente a partir de 2025 a medida que la tecnología central se abarate gradualmente, incluidas las baterías.
Requisitos y concepto del sistema HEV
PHEV y FHEV especialmente, dependiendo de los conceptos del sistema respectivos, tienen una mayor complejidad desde el punto de vista de la estrategia de control cooperativo (ICE y accionamiento eléctrico), y además son más sensibles a las restricciones de espacio de los componentes de la aplicación simplemente debido a la combinación / adición de las funciones ICE y e-drive. Esto no solo es cierto para los componentes electromecánicos, sino también para la electrónica, como el chipset digital, los componentes analógicos y de potencia.
La complejidad del sistema descrito resulta de la siguiente funcionalidad de nivel superior: En la desaceleración del vehículo, el motor eléctrico convierte la energía cinética en energía eléctrica y la almacena en la batería. Durante la aceleración, la energía eléctrica de la batería se utiliza para ayudar al ICE, por lo que se ahorra el consumo de combustible. Tener un motor eléctrico de alta potencia para un FHEV significa tener una alta capacidad generadora para que se pueda recuperar más energía cinética durante la desaceleración, lo que resulta en una mejora de la eficiencia del combustible en el rango de varias decenas de por ciento.
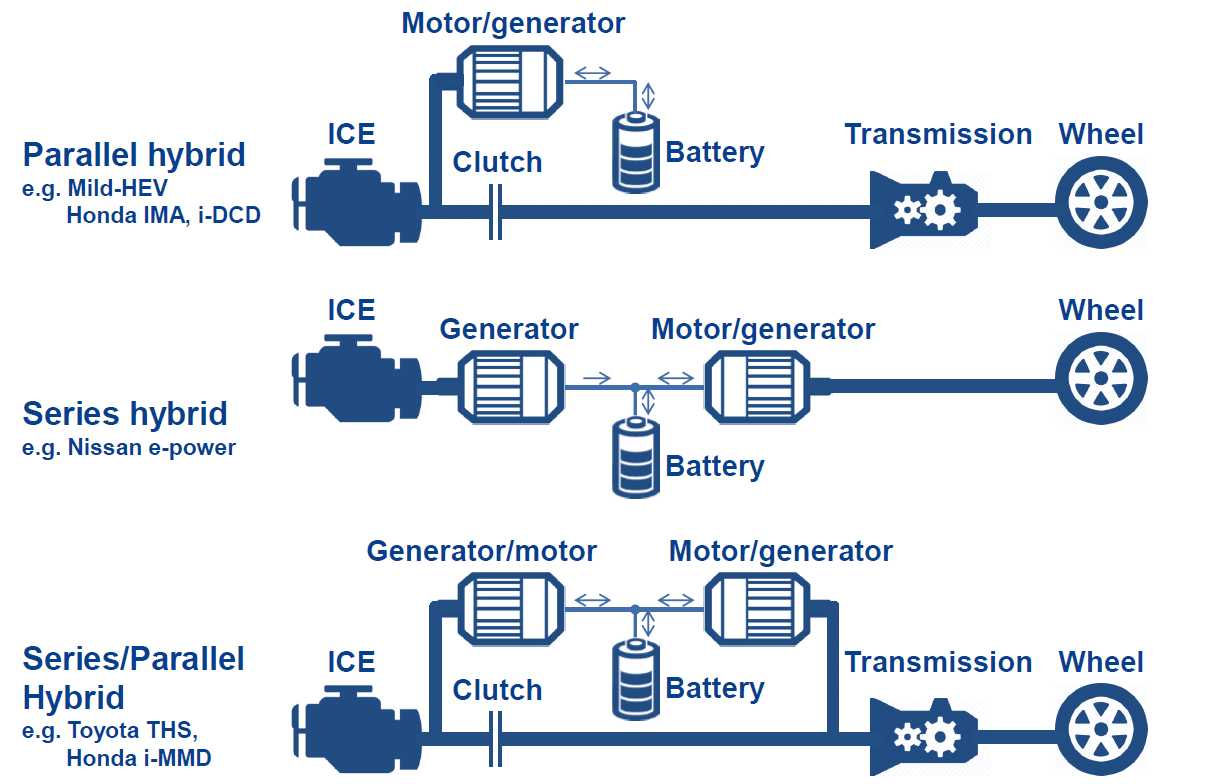
El más simple es un sistema híbrido paralelo. Se coloca un motor en paralelo con un ICE. El motor / generador ayuda a la aceleración usando energía eléctrica de la batería y recarga la batería usando el motor como generador durante la desaceleración. El beneficio de este sistema es menor costo y menor complejidad de control.
En el caso del sistema híbrido en serie, la energía cinética creada por el ICE es convertida en energía eléctrica por un generador, y luego la energía eléctrica es usada para generar energía cinética nuevamente por otro motor. Esto puede parecer un desperdicio de costos y energía. Sin embargo, la ventaja de este enfoque es que permite operar el ICE en el rango de velocidad / par de menor consumo de combustible. Un ICE tiene poca eficiencia de combustible a bajas velocidades (por ejemplo, <1500 rpm), altas velocidades (por ejemplo,> 4000 rpm) y regiones de bajo torque.
El híbrido Serie / Paralelo es el sistema más complicado. Cuando el ICE está funcionando en un rango de velocidad / par de bajo consumo de combustible, la salida del ICE se puede transferir directamente a las ruedas a través de un embrague y una transmisión. Si se necesita asistencia de torque, el motor electrónico puede ayudar con la aceleración y el ICE puede ahorrar combustible como en un sistema híbrido paralelo. Cuando la velocidad del vehículo es muy lenta, el embrague se desacopla y el sistema se comporta como un híbrido en serie para evitar operar el ICE en un rango de bajo consumo de combustible.
En el caso de las configuraciones de los tipos de sistemas híbridos en serie y en serie / paralelo, normalmente es necesario controlar de forma minuciosa e interdependiente una combinación de dos dispositivos de motor / generador.
Control HEV: desafío clave y solución
A partir de los conceptos de sistema de motor de tracción introducidos anteriormente, se hace evidente que los esfuerzos respectivos de control y sincronización, especialmente en el caso del sistema híbrido Serie / Paralelo, son complejos, debido a una alta carga de comunicación entre ambas entidades, así como al aumento de los esfuerzos de diagnóstico para mantener el nivel de ASIL objetivo.
Una solución obvia para optimizar estos esfuerzos es integrar ambos sistemas de control del inversor en una ECU, operada por un microcontrolador (MCU) único y altamente especializado. Al utilizar este concepto, la sincronización entre ambos lazos de control del inversor se puede implementar dentro de un controlador, lo que da como resultado un ancho de banda de comunicación alto y una latencia corta. Además, los conceptos de diagnóstico y seguridad funcional serán más sencillos mediante la selección de un dispositivo de destino compatible con ASIL. Otro beneficio de una solución integrada es sin duda una lista de materiales (BOM) altamente optimizada que va junto con requisitos de espacio de componentes reducidos, ambos efectos muy bienvenidos para el concepto general del sistema.
Solución: MCU con funciones de soporte xEV integradas
Un activo clave para las MCU específicas de la aplicación HEV es descargar el proceso de cálculo de la matemática vectorial para el algoritmo de control del motor a una IP de procesamiento dedicada. Al usar este método, la MCU puede equiparse con un número menor de núcleos de CPU mientras se encarga de otras tareas de software como se describe anteriormente. Desde una perspectiva de seguridad funcional, es obligatorio considerar en profundidad las suposiciones de uso del concepto de control de HEV integrado, para mantener el nivel ASIL requerido para la MCU como un elemento de seguridad fuera de contexto (SEooC).
Unidad de control de motor mejorada (EMU3)
La «Unidad de control de motor mejorada 3» (EMU Gen3) integrada es un conjunto de módulos de acelerador de control de motor individuales que calculan los valores de comparación de PWM trifásicos utilizando un algoritmo de control vectorial, generando patrones de onda rectangulares basados en los valores de corriente del motor medidos por un Convertidor A / D. Además, el valor del ángulo del motor se obtiene a través de un “Convertidor de resolución a digital” (RDC3A) integrado, que realiza la función de interfaz del sensor de posición. Los resultados del cálculo del EMU3 son utilizados por el TSG3, un temporizador de motor trifásico, para generar ondas PWM y rectangulares.
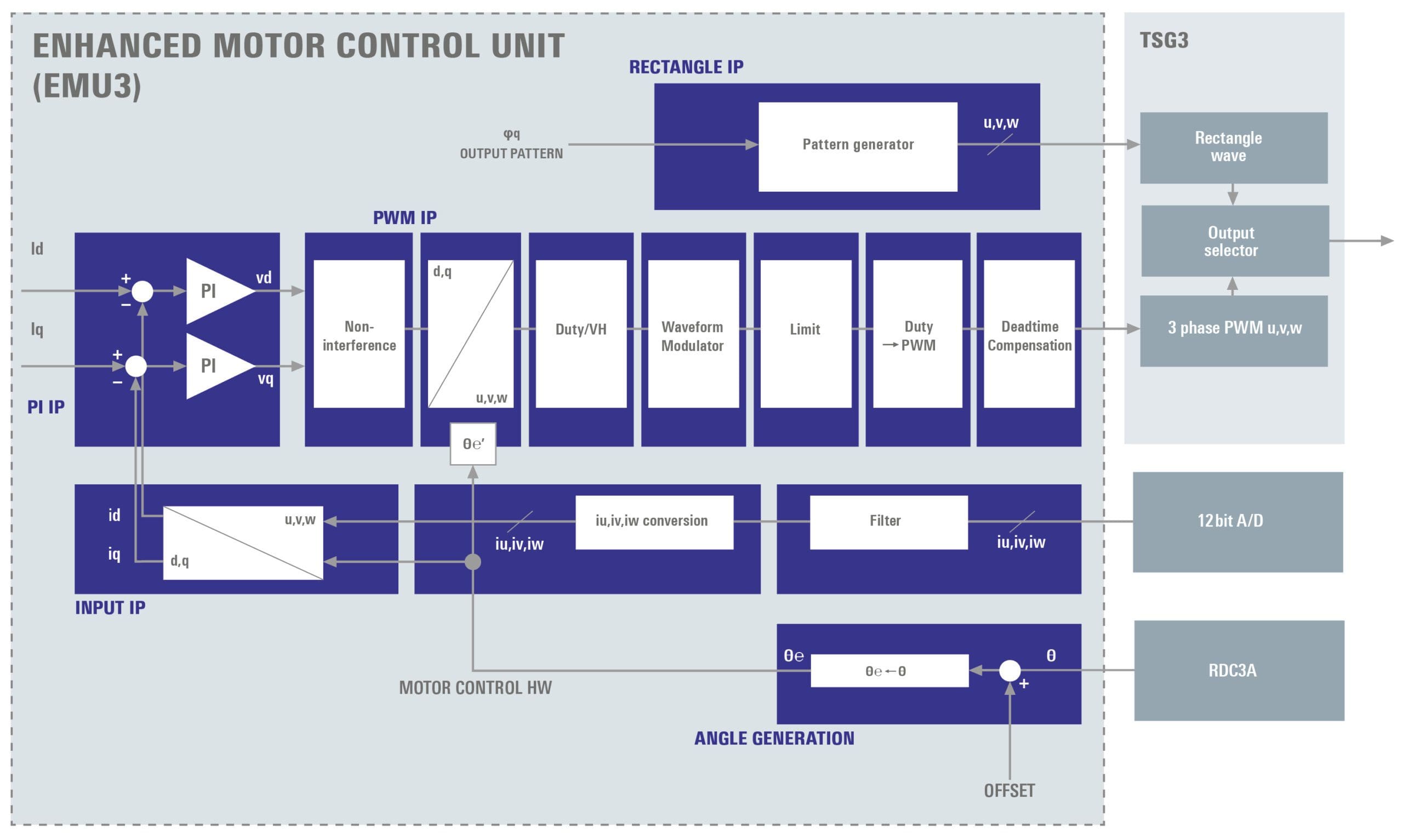
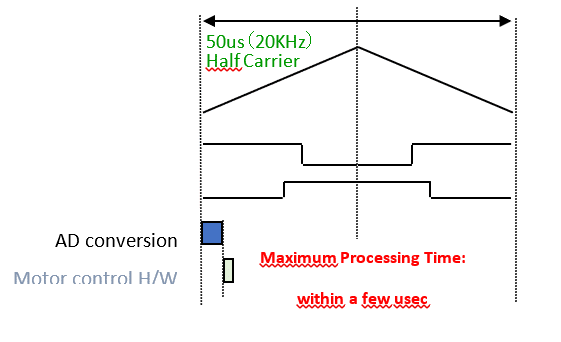
Debido a la aceleración de HW de las operaciones matemáticas vectoriales, el EMU3 IP puede calcular el siguiente valor de configuración de PWM de una manera muy rápida.
El EMU3 IP puede ejercer funciones de control motor en combinación con intervenciones de software específicas del usuario entre cualquiera de sus bloques funcionales. Por lo tanto, se puede realizar un concepto de control flexible que combina la aceleración de hardware y el software de usuario individual.

Control de generador / motor eléctrico dual
La solución clave para lograr la capacidad de control de generador / motor eléctrico dual se basa en cómo se incorporan en el sistema del microcontrolador el IP de control de motor introducido anteriormente (“EMU3”), así como la interfaz del sensor de posición integrado.
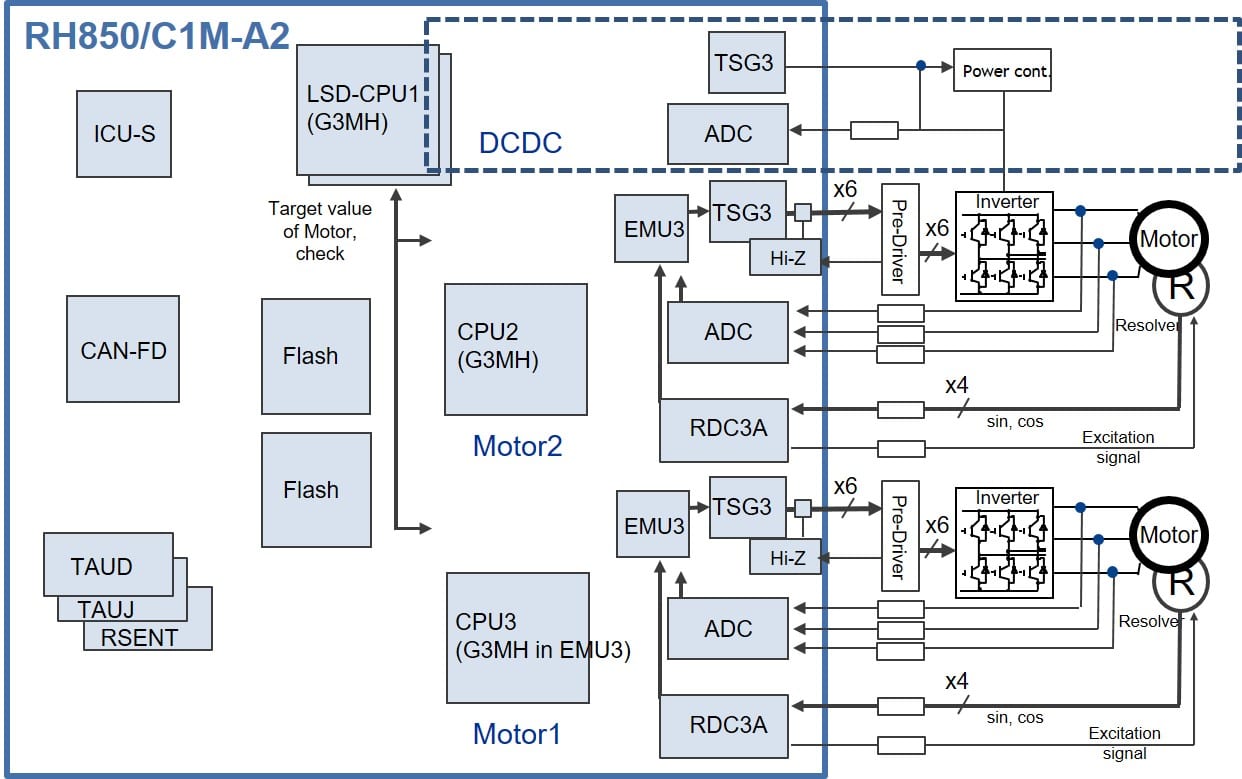
El siguiente diagrama muestra el enfoque real para controlar dos motores eléctricos (consulte el glosario para obtener definiciones de abreviaturas):
- CPU2 y CPU3 controlan cada uno un motor respectivamente. Mediante el uso de EMU3, el procesamiento de algoritmos de control de motores de alto rendimiento, como la transformación Park / Clark para la generación de patrones PWM, se traslada de la CPU a EMU3. Esto permite que las CPU realicen el movimiento de otras tareas importantes del software, como el procesamiento de diagnóstico.
- La CPU1 se puede utilizar para otras funciones: es decir, para realizar el control del convertidor CC / CC como una función complementaria opcionalmente integrada para optimizar el diseño general del sistema HEV. Otras funciones comprenden el control de la comunicación y las «funciones de limpieza», incluidos los diagnósticos.
- RDC3A es la interfaz de convertidor dual de resolución a digital integrada MCU (equivalente a Tamagawa AU6805), o más genéricamente, la interfaz del sensor de posición del motor, capaz de conectarse a señales de sensor de posición inductiva o de resolución analógica.
Resumen
Los vehículos híbridos que operan en base a combinaciones de e-drive / ICE necesitan especialmente sistemas de propulsión rentables y de tamaño optimizado debido a la mayor complejidad del sistema. Los microcontroladores de alto rendimiento (MCU) específicos del motor de tracción incluidos con una función de acelerador HW dedicada para cálculos matemáticos vectoriales pueden ayudar a lograr un diseño general optimizado del sistema electrónico y electromecánico.
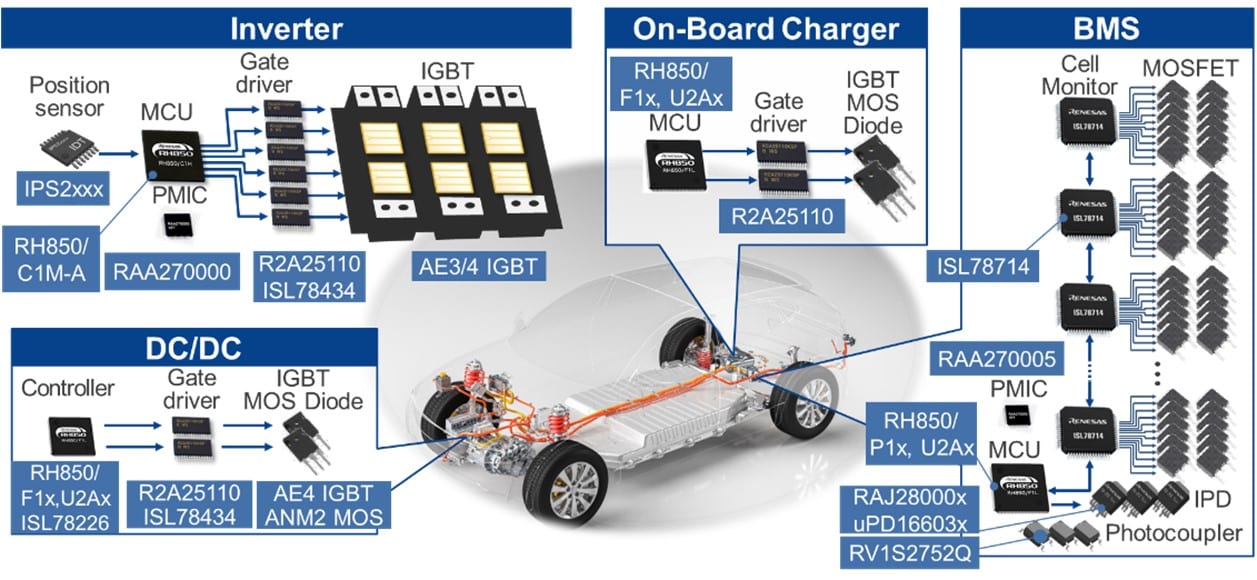
Oferta de soluciones de Renesas
En Renesas, existen generaciones de conceptos probados para el control de HEV dentro del microcontrolador de 40 nm, el RH850 / C1M-Ax. Este dispositivo, y sus sucesores de 28 nm que pronto se lanzarán, se centran en las funciones de control del inversor para motores de tracción. Los PMIC, controladores de puerta y dispositivos IGBT adecuados, así como las soluciones llave en mano de inversores, pueden reducir significativamente los esfuerzos de I + D de los clientes (consulte la figura 9).
El RH850 / C1M-Ax que cumple con ASIL-C está equipado con un núcleo de CPU de paso de bloqueo G3MH de 32 bits RH850, que funciona a una frecuencia de 240MHz para el C1M-A1. Hay dos núcleos G3MH, uno de los cuales está bloqueado, operando a una frecuencia de 320MHz en el C1M-A2. Junto con ROM, RAM y DMA, estos dispositivos incluyen varios temporizadores, como un temporizador de control de motor (TSG3), varias interfaces seriales que incluyen CAN (compatible con CAN FD), un convertidor A / D de 12 bits (ADC), un R / D convertidor (RDC3A) que convierte la señal de salida del resolver en datos digitales de ángulo del motor, y una unidad de control de motor paralelo y sub-CPU (EMU3), que proporciona funciones periféricas ideales para el control de motores en HEV y EV. Un ecosistema completo con herramientas incl. El desarrollo basado en modelos está completando esta solución integral de control de motores de tracción.
| Abbreviation | Description | Background |
| xEV | Comprising BEV, FHEV, PHEV, MHEV | Umbrella term |
| PHEV | Plug-In HEV | HV battery with >40KW e-motor |
| FHEV | Full (strong) HEV | HV battery with 20-40KW e-motor |
| MHEV | Mild HEV | 48V battery with 5-13KW e-motor |
| ICE | Integrated Combustion Engine | Conventional combustion engine |
| MCU | Microcontroller Unit | |
| EMU | Enhanced Motor control Unit | |
| RDC | Resolver to Digital Converter | |
| TSG3 | A 3-phase motor timer | |
| PWM | Pulse Width Modulation | |
| A/D or ADC | Analog to Digital Converter | |
| ICU-S | Integrated Cryptography Unit | |
| CAN (FD) | Controller Area Network – Flexible Data rate | |
| TAUx | Timer Units | |
| RSENT | SENT interface | |
| SEooC | System element out of context |
Figura 9 Abreviaturas utilizadas.




