Comprobación de radares de ondas milimétricas para ADAS y conducción autónoma en automoción
Autor: Tomohide Yamazaki
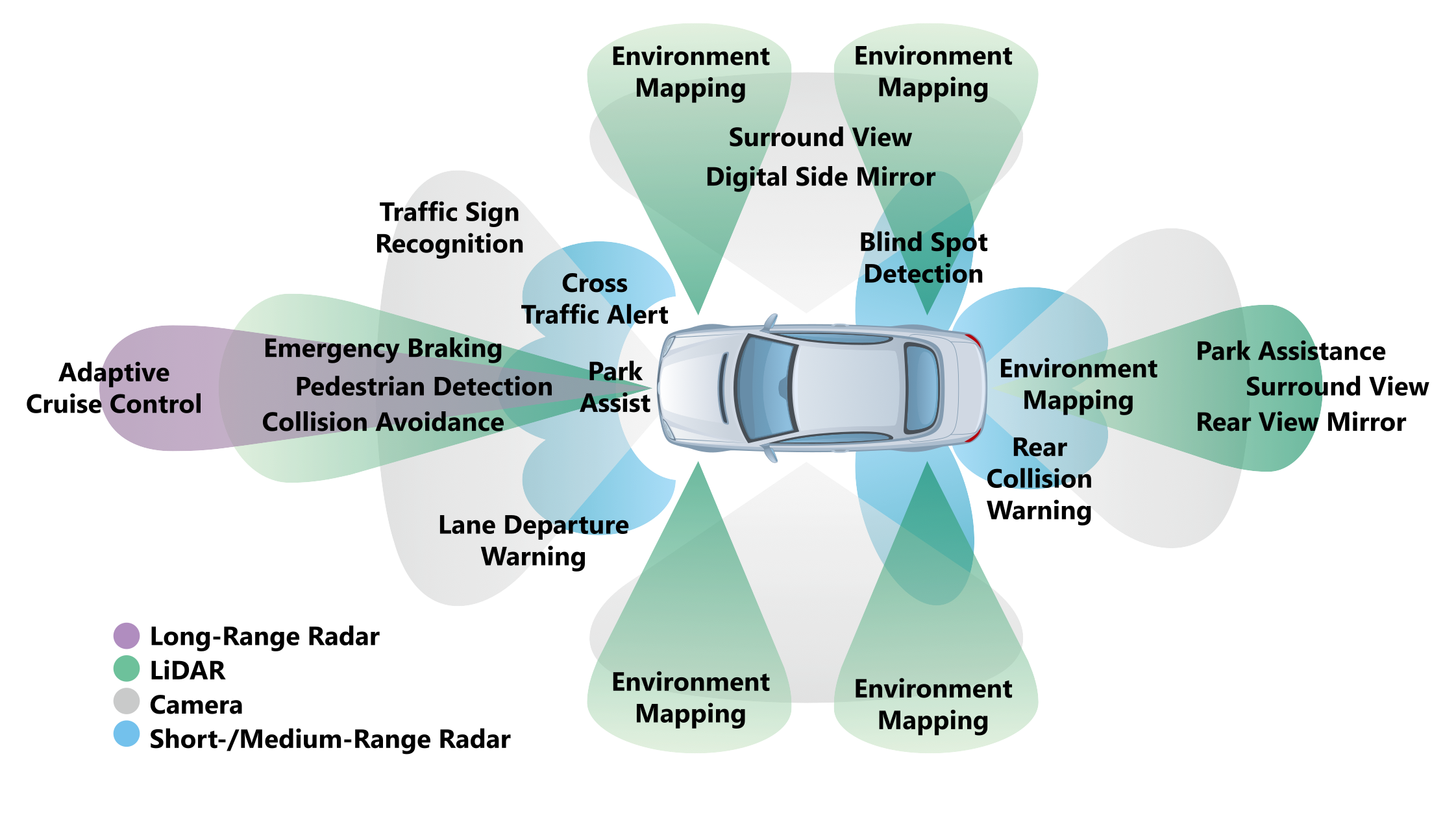
El radar de ondas milimétricas se utiliza en el ámbito de la automoción para detectar personas y objetos en aplicaciones de Sistemas Avanzados de Ayuda a la Conducción (ADAS, por Advanced Driver Assistance Systems) y conducción autónoma. Entre los sensores que suelen monitorizar el entorno del vehículo se encuentran el radar, las cámaras y el LiDAR (Light Detection And Ranging). Los ADAS asisten al conductor en numerosas operaciones, como alerta de colisión, freno automático y asistente de estacionamiento. Con conducción autónoma, los datos del sensor se utilizan para controlar el vehículo automáticamente.
El radar de automoción funciona generalmente en las bandas de 24 y 76 GHz. La banda de 24 GHz se emplea para monitorizar el perímetro a corta y larga distancia con el fin de evitar choques y minimizar los daños en caso de colisión, así como para monitorizar la parte delantera y trasera. Debido a su alta resolución, el radar de 76 a 77 GHz se utiliza principalmente para detectar obstáculos que se hallan a 100-200 metros por delante del vehículo. El radar también se usa para aplicaciones de detección dentro del habitáculo. Por ejemplo, los sistemas que impiden dejar a niños o animales en los coches funcionan en las bandas de 60 a 77 GHz. La Tabla 1 muestra las frecuencias asignadas al radar de automoción en cada región.
Tabla 1: Frecuencias asignadas a los radares de ondas milimétricas para automoción en cada región.
Métodos de radar
Las medidas del radar de automoción usan el método de pulso o el de onda continua modulada en frecuencia (FMCW, por Frequency-Modulated Continuous Wave). El método de pulso mide el tiempo de ida y vuelta de la onda de radio entre el transceptor y el objeto, y viceversa.
El método FMCW transmite señales de radio periódicas con una frecuencia creciente durante un cierto período de tiempo hasta un objeto. En este caso, las ondas de radio transmitidas y reflejadas interfieren para generar una señal de pulsación. A partir del análisis de la diferencia entre la frecuencia y otros factores obtenidos de la señal de pulsación se pueden determinar la distancia hasta un objeto y su velocidad. La Figura 1 muestra las técnicas de modulación de señal para el radar de automoción.
Figura 1: Técnicas de modulación de señal para el radar de automoción: (a) método de pulso, (b) FMCW.
A diferencia del radar de pulsos, FMCW ofrece ventajas como una baja potencia de transmisión y una alta relación señal/ruido. Además, la frecuencia de respuesta relativamente baja del circuito transceptor simplifica el diseño, lo cual a su vez reduce los costes. De ahí que el método FMCW sea muy utilizado en los radares de automoción.
Fundamentos de FMCW
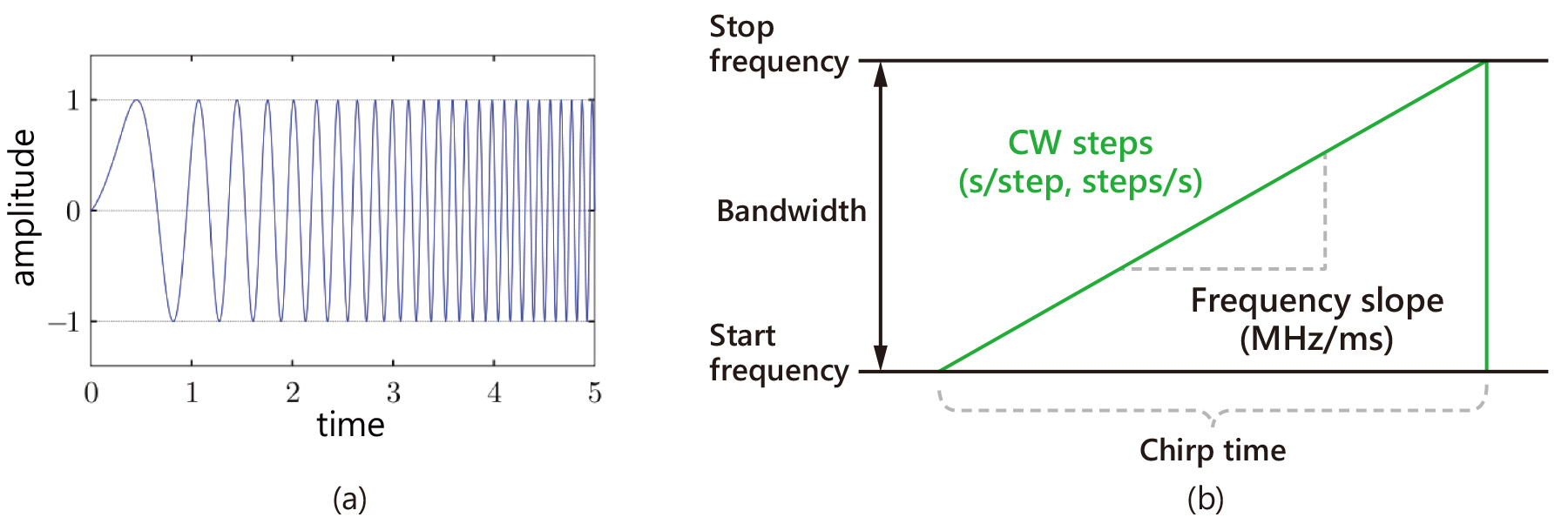
Una señal cuya frecuencia aumenta de manera lineal a lo largo del tiempo se denomina chirp (“gorjeo”). Puede verse en la Figura 2 (a) y es fundamental para el rendimiento de la señal FMWC.
Figura 2: Ejemplo de una señal chirp.
A partir de la señal chirp mostrada en la Figura 2 (b), y sustituyendo el eje vertical por la frecuencia, se obtienen la resolución del alcance o la distancia y la distancia máxima. Estas son las principales características que definen el rendimiento del radar FMCW. La resolución del alcance Dres se expresa como:
Dres = c/2B = c/2STc
donde c es la velocidad de la luz, B es el ancho de banda del chirp (frecuencia de parada final – frecuencia inicial), S es la pendiente del chirp y Tc es la duración del chirp.
De la ecuación se deduce que cuando mayor es el ancho de banda del chirp, más alta es la resolución que se puede detectar. Por ejemplo, la resolución del alcance es de unos 7,5 cm para un ancho de banda de chirp de 2 GHz y la resolución del alcance es de unos 3,8 cm para un ancho de banda del chirp de 4 GHz.
El alcance máximo de detección es inversamente proporcional a la pendiente del chirp S, que representa la velocidad a la que aumenta la frecuencia. Esto significa que cuando más pequeña es la pendiente del chirp, mayor es el alcance de detección máxima.
Para una duración fija del chirp, un mayor ancho de banda B dará como resultado una resolución más elevada. No obstante, existe un compromiso dado que el alcance máximo de detección es reducido porque la pendiente del chirp aumenta con el ancho de banda. Este compromiso exige mucha atención al diseñar sistemas de radar de automoción.
El radar de ondas milimétricas para automoción priorizará el alcance de detección o la resolución dependiendo de la aplicación. Por ejemplo, para el control adaptativo de la velocidad de crucero es importante la capacidad de detectar un vehículo a larga distancia y no es tan necesaria una alta resolución. Por otra parte, evitar colisiones exige una alta resolución ya que el vehículo debe responder con rapidez frente a cambios repentinos a corta distancia.
A partir de la señal chirp también se pueden calcular la resolución de la velocidad del radar Vres y la velocidad de detección máxima Vmax mediante:
Vres = 𝛌/2Tc
Vmax = 𝛌/4Tc
donde la longitud de onda del radar 𝛌 = c/f.
La velocidad de detección máxima Vmax es inversamente proporcional a la duración del chirp Tc. Al reducir la duración del chirp aumenta la velocidad de detección máxima. Sin embargo, acortar la duración del chirp afecta negativamente a la resolución del alcance.
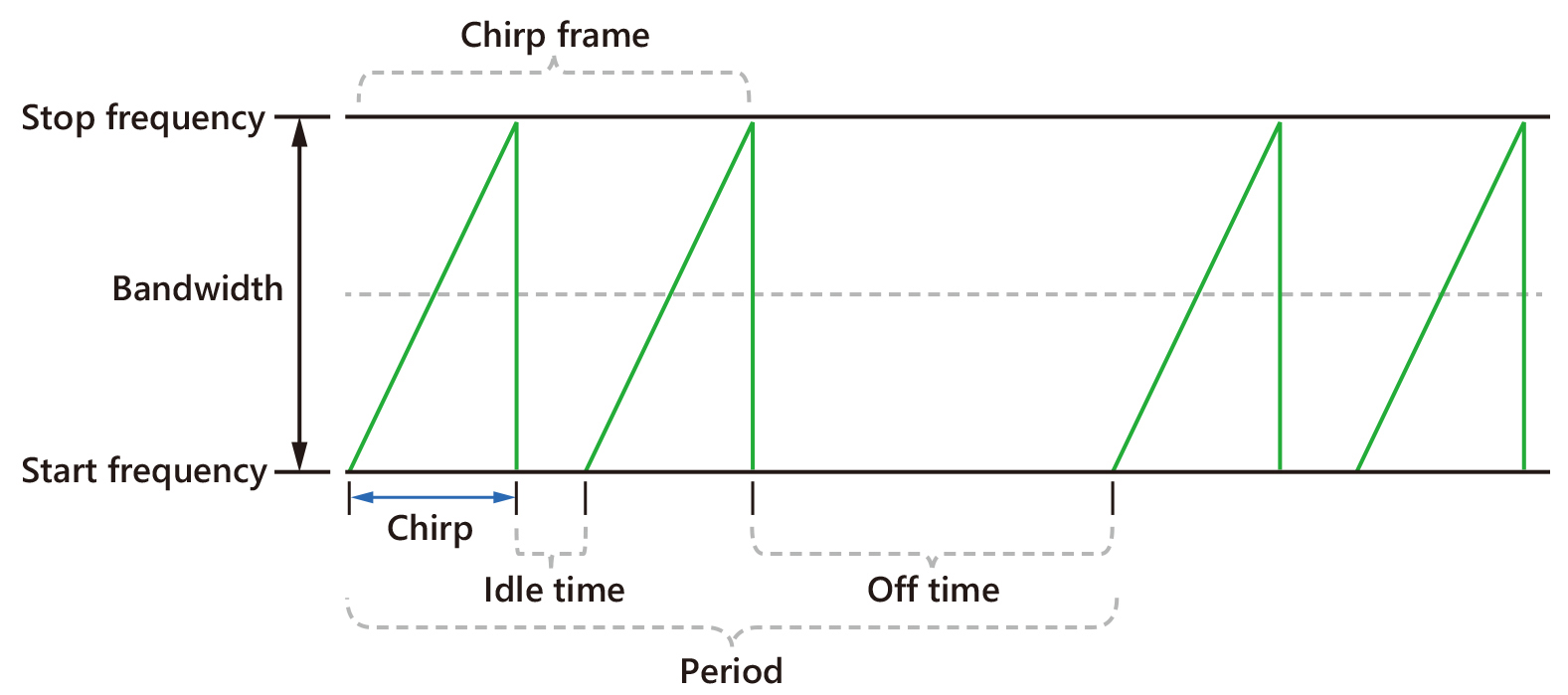
Una trama del radar está constituida por unos pocos o hasta varios cientos de chirps. La Figura 3 muestra una trama del chirp.
Figura 3: Características de la trama de FMCW.
El tiempo de la trama Tf se calcula multiplicando el número de chirps por la suma de la duración del chirp y el tiempo de espera (reposo) hasta se envía la siguiente señal chirp:
Tf = (Tc + Twait) x N
donde Twait es el tiempo de espera o reposo hasta que se envía el siguiente chirp, y N es el número de chirps.
El motivo de usar varios chirps dentro de una trama es obtener información Doppler del objeto para deducir su velocidad con exactitud. También hay un tiempo de descanso variable entre tramas que se puede aprovechar para optimizar el consumo del conjunto de chips.
Medida de la señal FMCW
Entre los factores que dificultan la medida de señales chirp se encuentran los cambios de la frecuencia del chirp en un tiempo extremadamente corto, la modulación de banda ultraancha y la frecuencia más alta de chirp. A menudo hay que tener en cuenta las tres al mismo tiempo.
Las señales chirp se suelen medir con un analizador de espectro, que se usa habitualmente para evaluar las características de transmisión en equipos de comunicaciones inalámbricas. Existen dos tipos de analizadores de espectro: de barrido y de tiempo real. El analizador de espectro por barrido se basa en la tecnología superheterodina, donde el muestreo y el procesamiento de la señal son operaciones que se repiten secuencialmente. Cuando la frecuencia del chirp cambia en un período de tiempo extremadamente corto, el analizador de espectro por barrido a menudo se muestra inoperante debido al procesamiento secuencial, que le impide capturar algunos chirps. Las secciones no capturadas del chirp se denominan puntos ciegos.
El analizador de espectro en tiempo real, que aplica la transformada rápida de Fourier, realiza el muestreo y el procesamiento de la señal en paralelo. Esto le permite capturar cambios durante un tiempo corto de la señal chirp. No obstante, el rango de la frecuencia de medida o ancho de banda de análisis del analizador de espectro en tiempo real está limitado al ancho de banda del instrumento, que suele ser del orden de unas decenas a unos pocos centenares de MHz. Este ancho de banda resulta inadecuado si se compara con el ancho de banda del chirp de FMCW para radares de automoción, que va desde unas pocas decenas de MHz hasta unas pocas decenas de GHz. Para solucionarlo es necesario medir varios rangos de frecuencia dentro del ancho de banda del chirp y “unir” las formas de onda. Este método puede captura todo el ancho de banda del chirp pero el tiempo que tarda en cambiar de rango de frecuencia puede generar un punto ciego.
La solución más completa para medir el chirp suele consistir en una combinación de osciloscopio y analizador de espectro. El osciloscopio es lo bastante rápido para adquirir las características de respuesta durante todo el tiempo y de frecuencia del chirp, así como las señales sinusoidales de la captura. El analizador de espectro también se utiliza para analizar las formas de onda adquiridas por el osciloscopio con el fin de evaluar las características de la frecuencia.
Evaluación del rendimiento básico de FMCW
El analizador de espectro de banda ultraancha MS2760A de Anritsu es compacto, fácil de usar y puede medir las características básicas de las señales de radar de ondas milimétricas para automoción, como la frecuencia de inicio/parada de chirp FMCW, así como su ancho de banda, amplitud, tiempo/período de trama y número de chirps por trama.
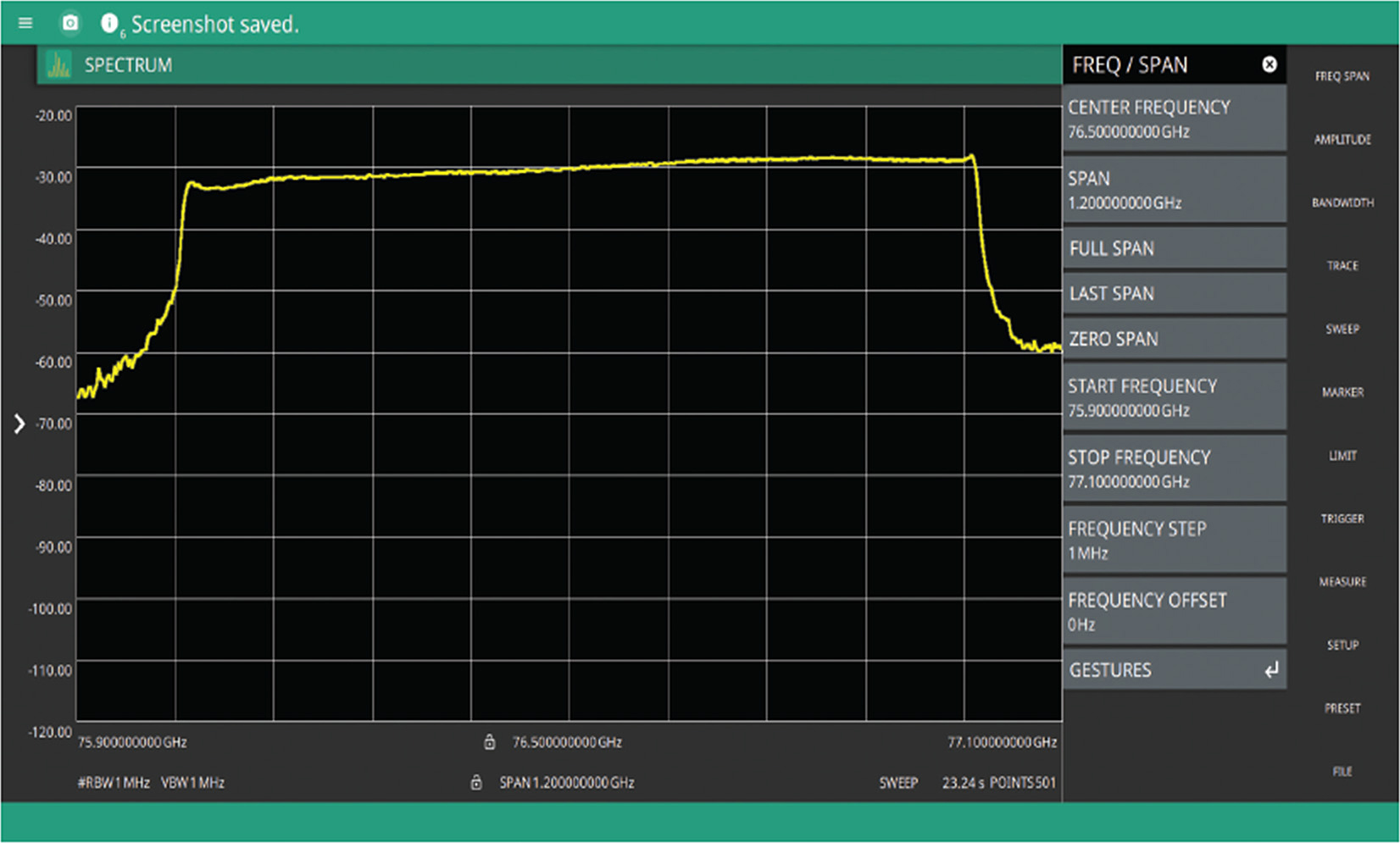
La Figura 4 muestra los resultados de una medida del chirp FMCW en la banda de 1 GHz entre 76 y 77 GHz mediante el MS2760A. Este instrumento captura todos los chirps FMCW en un solo barrido. Tras tomar las medidas, los datos de procesan en un PC.
Figura 4: Formas de onda de FMCW en una trama de radar.
Una función clave del MS2760A es su capacidad de cubrir un rango de frecuencia continuo de 9 kHz a 170 GHz para aplicaciones de banda ultraancha. Además, el instrumento es de tamaño bolsillo por lo que es fácil de transportar, instalar y para tomar medidas en entornos de producción, cámaras de test y pruebas sobre el terreno.
Estas características son posibles gracias a la tecnología NLTL (non-linear transmission line) patentada por Anritsu, y que acaba con la necesidad de un gran mezclador para la conversión descendente. El receptor NLTL “Shockline” de Anritsu puede generar armónicos a frecuencias muy altas y muestrear hasta 170 GHz.
Gracias a su tamaño compacto, el MS2760A permite instalar muchos analizadores de espectro para mejorar la comprobación y la eficiencia de desarrollo, así como para reducir el riesgo de retrasos en el proyecto y de elevar el gasto de capital.
Conclusión
Los radares de ondas milimétricas para automoción son cada vez más avanzados y entre ellos predomina el método FMCW, lo cual genera dificultades al realizar pruebas debido a los cambios rápidos de la frecuencia del chirp, el ancho de banda mucho mayor y las frecuencias más altas. La tecnología NLTL afronta estos retos con un instrumento de banda ultraancha, el MS2760A, que no solo es pequeño sino también ideal para comprobaciones básicas de radares FMWC en aplicaciones ADAS y de conducción autónoma.
Para ofrecer las mejores experiencias, utilizamos tecnologías como las cookies para almacenar y/o acceder a la información del dispositivo. El consentimiento de estas tecnologías nos permitirá procesar datos como el comportamiento de navegación o las identificaciones únicas en este sitio. No consentir o retirar el consentimiento, puede afectar negativamente a ciertas características y funciones.
Funcional
Siempre activo
El almacenamiento o acceso técnico es estrictamente necesario para el propósito legítimo de permitir el uso de un servicio específico explícitamente solicitado por el abonado o usuario, o con el único propósito de llevar a cabo la transmisión de una comunicación a través de una red de comunicaciones electrónicas.
Preferencias
El almacenamiento o acceso técnico es necesario para la finalidad legítima de almacenar preferencias no solicitadas por el abonado o usuario.
Estadísticas
El almacenamiento o acceso técnico que es utilizado exclusivamente con fines estadísticos.El almacenamiento o acceso técnico que se utiliza exclusivamente con fines estadísticos anónimos. Sin un requerimiento, el cumplimiento voluntario por parte de tu Proveedor de servicios de Internet, o los registros adicionales de un tercero, la información almacenada o recuperada sólo para este propósito no se puede utilizar para identificarte.
Marketing
El almacenamiento o acceso técnico es necesario para crear perfiles de usuario para enviar publicidad, o para rastrear al usuario en una web o en varias web con fines de marketing similares.