Desafíos en el diseño de transceptores de radar para ADAS/AD
Figura 1. Ubicación de los sensores de radar en un automóvil para una cobertura de 360°.
Autora: Marta Martínez-Vázquez, Senior Staff Product Marketing Engineer, Automotive Analog Product Marketing Division – Renesas Electronics Europe GmbH
Las tecnologías modernas de comunicación y detección han revolucionado la forma en que se diseñan los automóviles. Para aumentar la seguridad y avanzar hacia la conducción autónoma, los nuevos vehículos deben incluir sistemas que puedan interactuar con su entorno, infraestructura u otros participantes del tráfico para detectar posibles fuentes de peligro. Los sensores automotrices son, por tanto, clave para mejorar la seguridad vial y alcanzar altos niveles de conducción autónoma. Su uso contribuirá a reducir el número de accidentes de tráfico y muertes en las carreteras de todo el mundo, con el objetivo final marcado por Visión 0: Cero muertos en accidentes de tráfico en 2050.
Entre los sensores que se consideran para la conducción asistida y autónoma, el radar ha demostrado ser extremadamente seguro para aplicaciones ADAS como el control de crucero adaptativo. Se espera que las aplicaciones del radar se amplíen en el futuro, ya que el radar se usa a menudo junto con otras tecnologías de detección, como cámaras de video y lidar. Las ventajas y desventajas de los diferentes tipos de sensores se resumen en la siguiente tabla. La conducción totalmente autónoma probablemente requerirá la fusión de datos obtenidos de diferentes tecnologías de detección. Con sensores distribuidos alrededor del automóvil, será posible brindar una cobertura completa de 360°, creando un “capullo” de seguridad alrededor del automóvil. La Figura 1 ilustra el concepto cuando solo se consideran sensores de radar.
Pros y contras de diferentes tecnologías de sensores para aplicaciones automotrices
PROS
CONTRAS
Optical imaging (video)
Gran campo de visión
Alta resolución
Limitado por el clima y las condiciones de luz.
Alta carga de trabajo de procesamiento
Ultrasonic
Funcionamiento en todas las condiciones meteorológicas y de luz
muy bajo costo
Rango muy corto
Infrared
Funcionamiento en condiciones de poca luz
Rango de detección corto
Lidar
Alta precisión (rango, resolución y posición)
Limitado por las condiciones climáticas (niebla, nieve)
No hay información directa sobre la velocidad.
Radar
Menos sensible a las condiciones climáticas.
Rango de detección largo
Buena resolución y estimación de posición.
Medición de ángulos complejos
Clasificación de objetivos complejos
No maduro para completamente AD
Una ventaja adicional del radar es que los sensores de radar se pueden instalar fácilmente detrás de elementos comunes del automóvil, como parachoques o emblemas, para que sean invisibles y no afecten la estética. La banda de frecuencias de 76 GHz a 81 GHz ha sido aceptada por la mayoría de los países como la banda de frecuencias para radares de automóviles. La integración física se vuelve más fácil con altas frecuencias de operación, ya que se reducirá el tamaño de las antenas de radar. Sin embargo, aparecen nuevos desafíos al aumentar la frecuencia, debido a las compensaciones de potencia, mayores pérdidas y un mayor impacto de las tolerancias de fabricación.
El radar también es especialmente adecuado para aplicaciones automotrices, ya que los vehículos son buenos reflectores para las ondas de radar. Se puede utilizar tanto para funciones de «confort», como el control de crucero automático, como para aplicaciones de detección de alta resolución, que se suman a la seguridad pasiva y activa de un vehículo. Los ejemplos incluyen detección de punto ciego, asistencia de cambio de carril y alerta de cruce de tráfico trasero, detección de peatones y bicicletas cerca del vehículo.
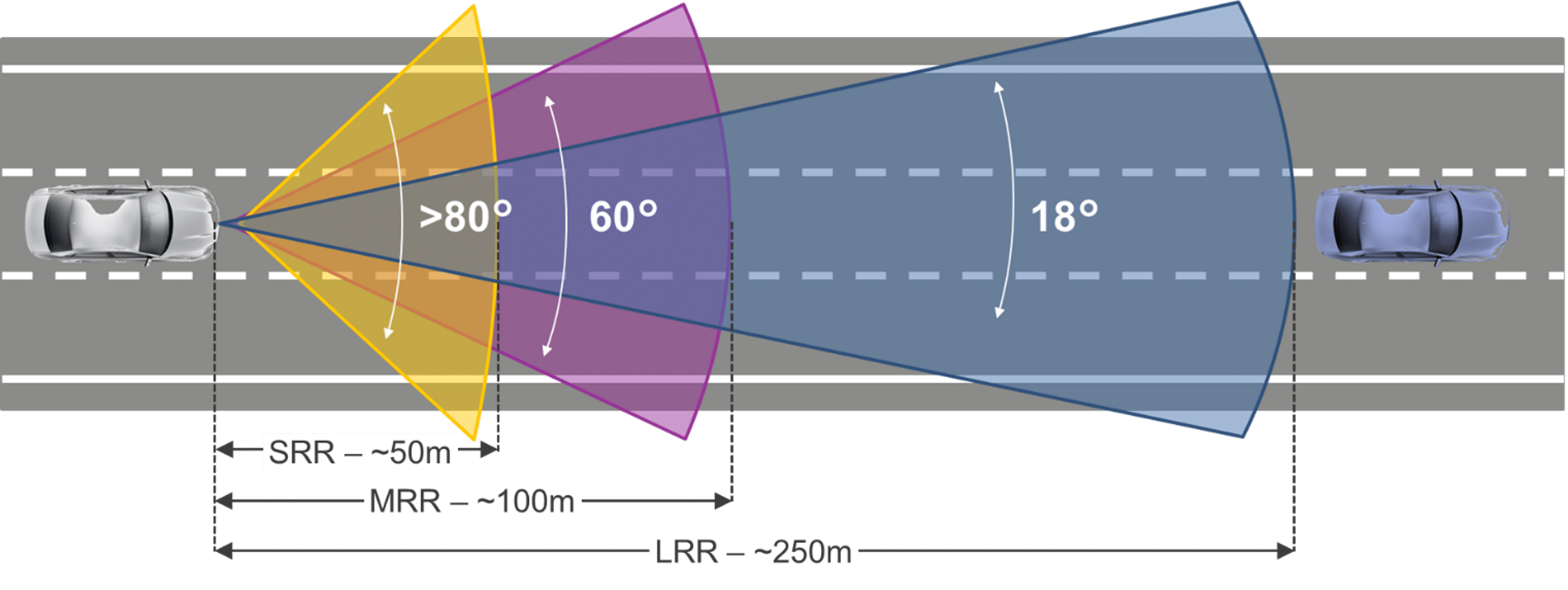
Hoy en día, los sensores de radar se pueden clasificar en función de su rango de detección, como se muestra en la figura 2 a continuación.
Radar de corto alcance (SRR): hasta 50 m con amplio campo de visión y alta resolución
Radar de rango medio (MRR): hasta 100 m con campo de visión medio
Radar de largo alcance (LRR): 250 m o más de alcance, con un campo de visión más estrecho y menos centrado en la resolución
Con el desarrollo de nuevas tecnologías, se espera que el rango se extienda más allá de estos límites, mientras que la dimensión vertical se agrega a la detección para proporcionar una imagen 3D completa de los alrededores.
Figura 2: Clasificación de rango de radar automotriz
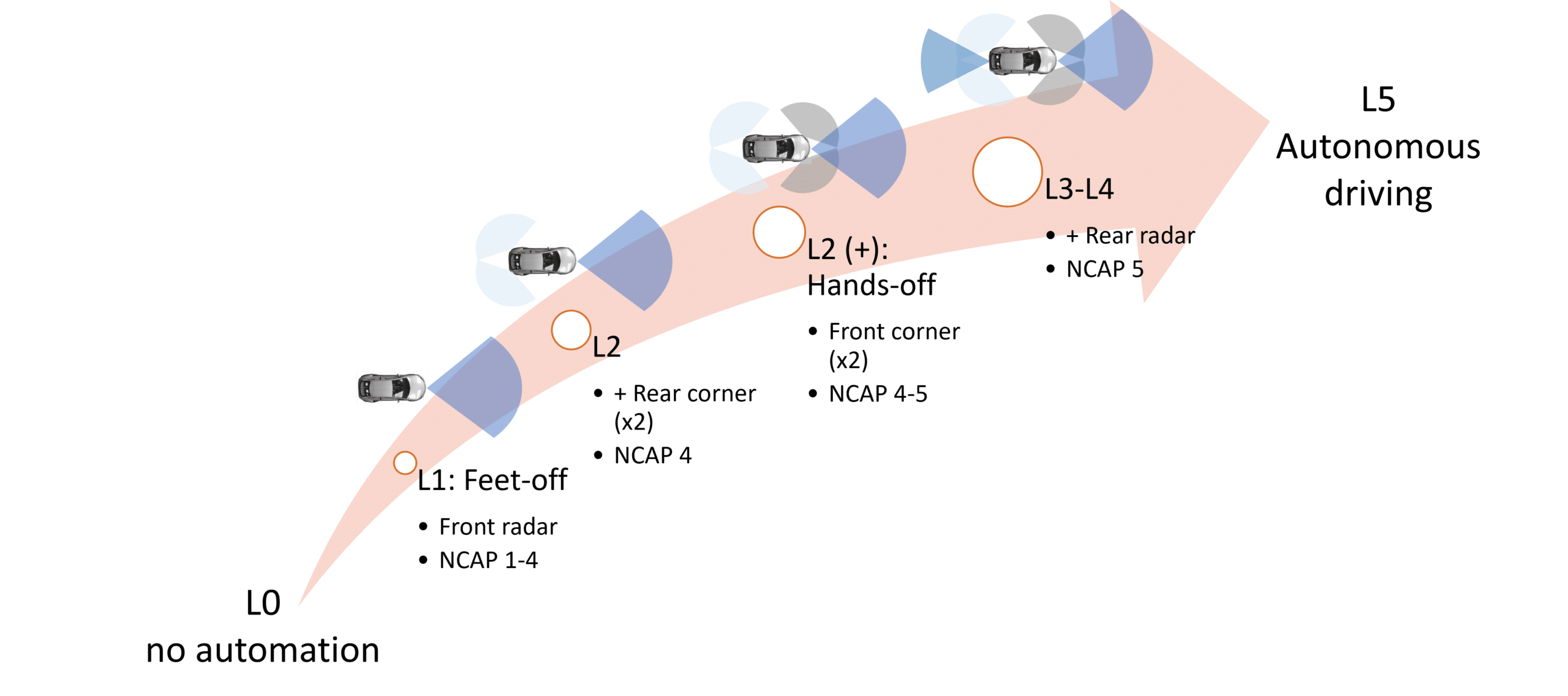
En el futuro, se agregarán múltiples módulos de radar a los automóviles, para pasar de una configuración básica de radar con visión de futuro que proporciona conducción autónoma básica de Nivel 1 a Nivel 4 en el NCAP (programa de evaluación de automóviles nuevos). Pronto, más automóviles estarán equipados con sensores de radar en las extremos del automovil para alcanzar el nivel 2+ de conducción autónoma y NCAP 4-5 en automóviles estándar, y el nivel 3-4 en conducción autónoma y NCAP 5 para el segmento premium (figura 3).
Figura 3: Radar automotriz para diferentes NCAP y niveles de conducción autónoma
Sin embargo, la forma en que se manejarán los datos del radar dependerá en gran medida de la arquitectura de los vehículos. Las tendencias actuales hacia un mayor rendimiento de las unidades informáticas centrales también están impulsando una evolución de la arquitectura E/E en el vehículo para cambiar a una arquitectura distribuida. Aunque la migración a una arquitectura totalmente distribuida no se completará hasta la década de 2030, las implementaciones parciales aparecerán antes en el mercado. Primero, algunos controladores de dominio se utilizarán para funciones específicas como ADAS. Luego aumentará el número de controladores de dominio, mientras que los controladores de zona también se introducirán antes de que se establezca una arquitectura E/E totalmente centralizada, en la que la computadora central del vehículo se conectará a los sensores a través de las unidades de control de zona. Esta evolución también requerirá aumentar la capacidad y fiabilidad de las redes del vehículo, así como la complejidad del software.
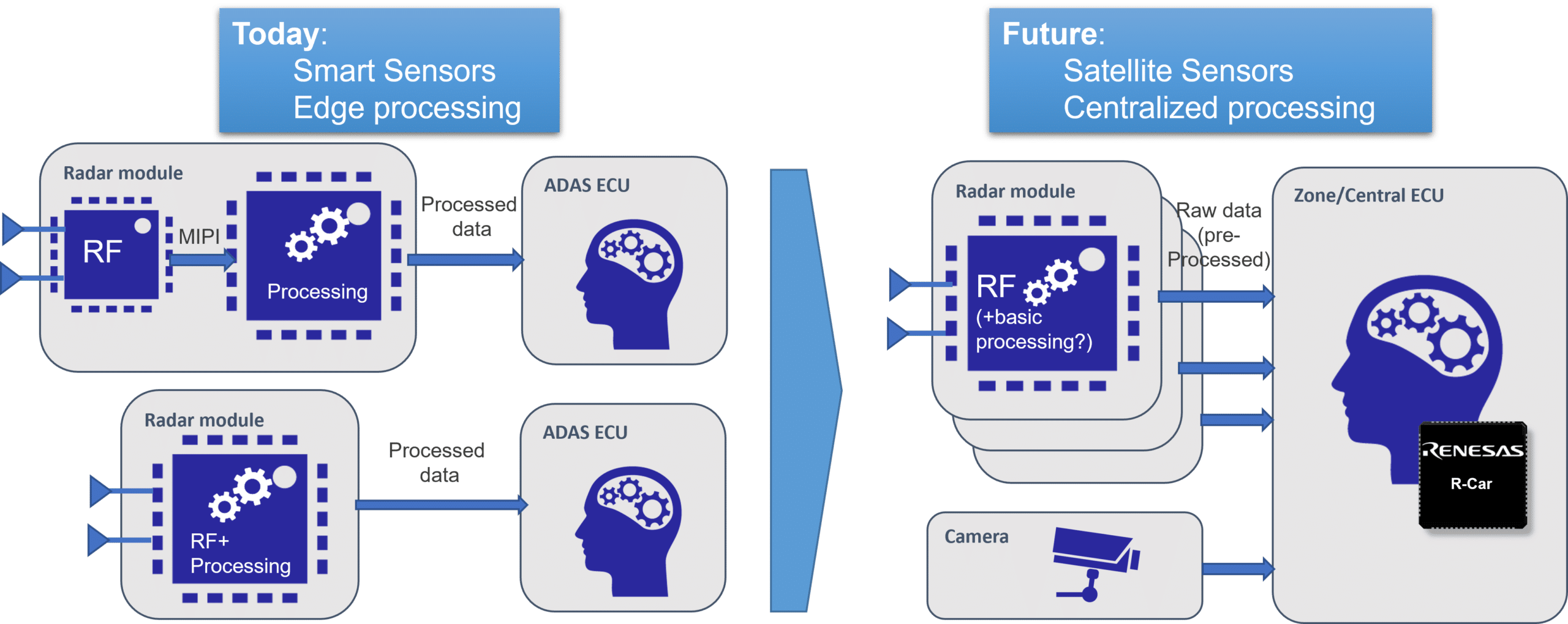
Con la introducción de las nuevas arquitecturas E/E, parte del procesamiento del radar podría descargarse del módulo del sensor del radar (computación de borde) a la zona o la ECU central, lo que permite cálculos más eficientes. Hoy en día, el procesamiento de radar completo se lleva a cabo en el borde, con «sensores inteligentes», como se muestra en la figura 4 a continuación. Esto significa que varios módulos de radar independientes están distribuidos alrededor del vehículo, cada uno de ellos con su propio transceptor y capacidades de procesamiento. Los datos procesados, normalmente la lista de objetos, se transfieren luego a una ECU ADAS para su posterior procesamiento y, potencialmente, la fusión con los datos de otros sensores. Con una distribución adecuada de sensores en el automóvil, el entorno del vehículo puede percibirse adecuadamente y pueden identificarse los obstáculos.
Figura 4: Sensores inteligentes con procesamiento de bordes
Con el desarrollo de arquitecturas informáticas centralizadas, es probable que el procesamiento de los datos de algunos módulos de radar pase del sensor de radar a una unidad de procesamiento remota, ya sea una ECU de zona o directamente la computadora central del vehículo. Los módulos de radar en sí mismos serían entonces menos «inteligentes» y realizarían solo una cantidad limitada de procesamiento de las señales de radar recibidas. Por ejemplo, el módulo determinará la distancia a los diferentes objetos y proporcionará los perfiles de alcance al procesador remoto. Luego recibirá los datos preprocesados de diferentes módulos de radar satelital y realizará los pasos de procesamiento restantes para cada conjunto de datos, para generar la lista de objetos con sus respectivas características (distancia, dirección y velocidad), para crear la imagen completa de los alrededores. Los resultados obtenidos luego se fusionarán o combinarán con los resultados obtenidos de otros sensores. Esta nueva configuración de detección múltiple proporcionará la precisión necesaria y eliminará las redundancias para permitir altos niveles de conducción autónoma, como se muestra en la figura 5 a continuación.
Figura 5: Ejemplo de arquitectura de radar con módulos satelitales y procesamiento remoto en ECU basadas en zonas
En las primeras implementaciones de esta arquitectura centralizada, el preprocesado de los diferentes sensores de radar se puede transferir a las ECU de zona o centrales utilizando la red troncal Ethernet del automóvil. Cuando se necesita una definición más alta y la cantidad de radar es demasiado grande, como en el caso de un radar prospectivo o de imágenes, el procesamiento del radar aún puede llevarse a cabo en el propio sensor para reducir la cantidad de datos que se transferirán.
El procesamiento centralizado de datos de sensores de radar remotos ofrece una amplia gama de beneficios. En primer lugar, los propios módulos de radar se vuelven menos complejos, ahorrando así tamaño y coste, y reduciendo los problemas de disipación de calor. Las reparaciones y actualizaciones, tanto de hardware como de software, se vuelven más fáciles.
En segundo lugar, el uso de la red existente del automóvil, es decir, la red troncal de Ethernet, también reduce los costos y el peso del cableado. Además, los datos transferidos a través de Ethernet estarán disponibles en un formato que los hace más fáciles de almacenar y trabajar.
Finalmente, el procesamiento de los datos en las unidades de control del vehículo abre la puerta a una mayor eficiencia y operaciones más sofisticadas y complejas. Las capacidades de detección se pueden mejorar implementando la fusión de datos con la información obtenida de otras tecnologías de detección, como cámaras o lidar. El aprendizaje automático y la inteligencia artificial se pueden considerar para la detección y predicción avanzadas, lo que permite niveles más altos de conducción autónoma.
Se espera que tanto el procesamiento perimetral como la computación centralizada coexistan durante algunos años. La migración a arquitecturas E/E con computación centralizada requerirá acceso a enlaces de alta velocidad en todo el vehículo, lo que puede llevar al uso de diferentes estándares para el intercambio de datos. En cualquier caso, se hacen necesarias medidas de seguridad adicionales para garantizar la integridad y seguridad de los datos transferidos. El aumento del número de módulos de radar en el propio automóvil y en otros vehículos, todos ellos transmitiendo y recibiendo ondas de radio, también puede generar problemas de interferencia que deberán resolverse.
Renesas está trabajando para proporcionar soluciones de vanguardia para los vehículos del futuro. Renesas acaba de presentar su primer transceptor de radar de ondas milimétricas para automoción, el RAA270205, para ampliar sus soluciones de detección para ADAS. Renesas tiene como objetivo proporcionar componentes innovadores para los módulos de radar con transceptores de radar para imágenes, procesamiento centralizado y aplicaciones de imágenes, junto con ECU basadas en la serie R-Car Gen4.
Para ofrecer las mejores experiencias, utilizamos tecnologías como las cookies para almacenar y/o acceder a la información del dispositivo. El consentimiento de estas tecnologías nos permitirá procesar datos como el comportamiento de navegación o las identificaciones únicas en este sitio. No consentir o retirar el consentimiento, puede afectar negativamente a ciertas características y funciones.
Funcional
Siempre activo
El almacenamiento o acceso técnico es estrictamente necesario para el propósito legítimo de permitir el uso de un servicio específico explícitamente solicitado por el abonado o usuario, o con el único propósito de llevar a cabo la transmisión de una comunicación a través de una red de comunicaciones electrónicas.
Preferencias
El almacenamiento o acceso técnico es necesario para la finalidad legítima de almacenar preferencias no solicitadas por el abonado o usuario.
Estadísticas
El almacenamiento o acceso técnico que es utilizado exclusivamente con fines estadísticos.El almacenamiento o acceso técnico que se utiliza exclusivamente con fines estadísticos anónimos. Sin un requerimiento, el cumplimiento voluntario por parte de tu Proveedor de servicios de Internet, o los registros adicionales de un tercero, la información almacenada o recuperada sólo para este propósito no se puede utilizar para identificarte.
Marketing
El almacenamiento o acceso técnico es necesario para crear perfiles de usuario para enviar publicidad, o para rastrear al usuario en una web o en varias web con fines de marketing similares.






 para radares de automóviles")
