
Los robots industriales son más asequibles que nunca para las tareas de ensamblaje de precisión y recogida/embalaje (picking/packing) de alta velocidad. Gracias a las mejoras en capacidades como la visión, cada nueva generación ofrece una destreza y flexibilidad más parecidas a las del ser humano. Un sentido del tacto fiable y rentable les permite ahora manipular objetos frágiles para realizar una variedad aún mayor de tareas e interactuar de forma más segura con las personas.
Sensores de fuerza para robots
Se han explorado varias técnicas para introducir la detección táctil en los robots. Entre ellas se encuentran los sensores de metal líquido, que miden la resistencia de un metal líquido que fluye en canales microfluídicos y que es modulada por fuerzas externas. Aunque este tipo de sensor puede incorporarse alrededor de las puntas de los dedos del robot, no mide la fuerza 3D localizada. En su lugar, las fuerzas distribuidas se asignan a un cambio de resistencia. Un grupo de estos sensores puede detectar un patrón. De ahí que esta técnica se utilice sobre todo en tareas de clasificación especializadas tras un entrenamiento específico.
Otro enfoque utiliza una cámara óptica de alta gama para medir la deformación de un material elastomérico embebido o que cubre las superficies de agarre. Esta tecnología está disponible en el mercado y ya se utiliza en pinzas robóticas inteligentes multimodales. Sin embargo, la cámara necesita una matriz de píxeles considerable y la transmisión de los datos a velocidad de vídeo para su análisis exige un ancho de banda de comunicación y potencia considerables.
Una solución diferente, basada en la óptica, supera algunos de estos retos al utilizar un cuadrante de detectores de fotodiodos en lugar de una cámara completa. Una fuente de luz ilumina una cúpula elástica desde el interior y los detectores detectan la deformación de la cúpula debido a las fuerzas de contacto. Sin embargo, el consumo de energía es varias veces mayor que el de los típicos magnetómetros 3D, lo que puede proporcionar una alternativa aún más sencilla y eficiente.
En estos sensores magnéticos, se incorpora un imán en un material elastomérico similar al utilizado en el sistema basado en la cámara. Un magnetómetro montado en la parte trasera proporciona una detección de fuerza en 3D midiendo el cambio en el campo magnético causado por el desplazamiento del imán a medida que se deforma el elastómero. Se han demostrado varios sensores de este tipo utilizando un magnetómetro de una sola salida, que puede imaginarse como un píxel táctil o «taxel». Los investigadores han construido varias configuraciones, desde simples matrices de un solo píxel y 2×2 hasta una piel magnética continua de 15 mm2 formada por micropartículas magnéticas. Los sensores de fuerza magnéticos de un solo píxel como éstos han logrado una resolución inferior a 1 mm al combinar el sensor con la magnetización sinusoidal de una película flexible y técnicas de aprendizaje profundo (deep learning).
Los sensores magnéticos a los que se hace referencia aquí han utilizado el magnetómetro de un solo píxel Melexis MLX90393. Mientras que las ventajas de la detección magnética incluyen una potencia relativamente baja y una sobrecarga mínima de cálculo y comunicación, la detección de un solo píxel es vulnerable a la interferencia de campos magnéticos externos. La salida del magnetómetro puede verse distorsionada por efectos no relacionados en las proximidades, como la activación de un motor eléctrico, la presencia de otros imanes o las variaciones del campo magnético terrestre. Un sensor de fuerza magnética con múltiples píxeles cercanos dentro del mismo encapsulado de circuito integrado (CI) (figura 1) puede proporcionar inmunidad a los campos parásitos al permitir la medición diferencial. Este artículo describe cómo se construyó y probó el sensor magnético gradiométrico Tactaxis de múltiples píxeles
Prototipo de sensor
El sensor de desplazamiento lineal MLX90372 proporciona una plataforma conveniente para demostrar el principio de detección gradiométrica. Este sensor suele dar salida al desplazamiento angular a lo largo de un arco. Sin embargo, la configuración del dispositivo en modo de prueba permite el acceso directo a las lecturas magnéticas brutas de los píxeles individuales desde la memoria. El sensor está alojado en un encapsulado TSSOP estándar de 5 mm x 4,3 mm x 0,9 mm y contiene dos pastillas CMOS una al lado de la otra, con dos píxeles por pastilla. Por lo tanto, este componente único y compacto contiene cuatro píxeles magnéticos colocados a unos 2 mm de distancia que permiten medir el gradiente del campo magnético. Cada píxel detecta la componente normal del campo Bz y la componente Bx en el plano.
En la parte superior del encapsulado de CI se coloca un elastómero blando que contiene un imán de disco embebido con magnetización axial. El uso de una muestra de elastómero de forma cilíndrica minimiza la inclinación del imán y presenta una superficie flexible. La aplicación de una fuerza de contacto sobre el elastómero desplaza el imán, lo que modula el patrón del campo magnético. Cada uno de los cuatro píxeles magnéticos detecta este desplazamiento y, por tanto, los efectos de las fuerzas normales y laterales. Para un desplazamiento normal del imán, la componente gradiométrica ∂Bx/∂x es la más impactada. Por el contrario, para un desplazamiento lateral, el impacto es mayoritariamente sobre la componente gradiométrica ∂Bz/∂x.
Obsérvese que el sensor sólo mide el desplazamiento del imán. La conexión entre el desplazamiento y la fuerza aplicada depende de otros factores y requiere una calibración y un cálculo adicionales. El tamaño del imán, la dureza del elastómero y el diámetro del cilindro de elastómero influyen en la magnitud de la salida del sensor cuando se aplica una fuerza. Un imán más grande y potente aumenta la relación señal-ruido (SNR), con poco impacto en la fuerza a escala real. Un elastómero más duro permite una mayor fuerza a escala real. Sin embargo, para la misma fuerza aplicada, el desplazamiento del imán será menor en comparación con un material más blando. Por lo tanto, el aumento de la dureza también reduce el cambio de la señal magnética y, por lo tanto, la SNR. Por último, el diámetro del elastómero actúa como un factor de escala entre la fuerza global y la presión localizada justo encima del imán. Un diámetro mayor distribuye la fuerza sobre un área más grande, con lo que se reduce la SNR, al tiempo que se acomoda una fuerza mayor a escala total.
Procesamiento de la señal e inferencia
La figura 2 muestra el diagrama de bloques funcional de la cadena de señales.
El procesamiento de la señal se realiza fuera del chip y comienza por escalar las ocho señales digitales de salida del chip para corregir la caída de la sensibilidad del efecto Hall con el aumento de la temperatura (-0,5%/◦C).
A continuación, se rechazan los campos magnéticos parásitos utilizando combinaciones de componentes de campo. La media del campo Bx y el campo Bz se eliminan primero, dejando los términos restantes que están relacionados con el gradiente del campo magnético. En efecto, el algoritmo del sensor de fuerza procesa las diferencias de campo magnético dentro de las dos matrices.
El bloque de aumento de características calcula la norma √(Bx2 + Bz2) en cada píxel de detección, produciendo una señal vectorial de 12 dimensiones {Bx, Bz, Bnorm} en cada píxel.
El último paso genera un nuevo vector que contiene todas las combinaciones polinómicas de segundo orden del vector de 12 dimensiones, incluyendo los términos de interacción. Esto produce una señal vectorial de dimensión 91.
Por último, la etapa de inferencia calcula los valores de fuerza y par planar a partir de la señal vectorial utilizando una matriz de pesos de 91 por 5. Los pesos se obtienen mediante un procedimiento de entrenamiento que utiliza una célula de carga de referencia montada en una plataforma móvil de 3 ejes para tensar el elastómero aplicando un desplazamiento conocido. La fuerza de la célula de carga y las correspondientes señales magnéticas del sensor se midieron y guardaron en 13.000 posiciones a lo largo de un rango de desplazamiento de 1,5 mm de profundidad y 1,1 mm de radio.
Inmunidad a los campos parásitos (SFI)
Para demostrar cómo se eliminan los efectos de los campos externos, se colocó el sensor entre dos bobinas de Helmholtz que generan ±2 mT (figura 3a). Un campo de intensidad equivalente puede experimentarse a unos 3 cm de distancia de los electrodomésticos comunes.
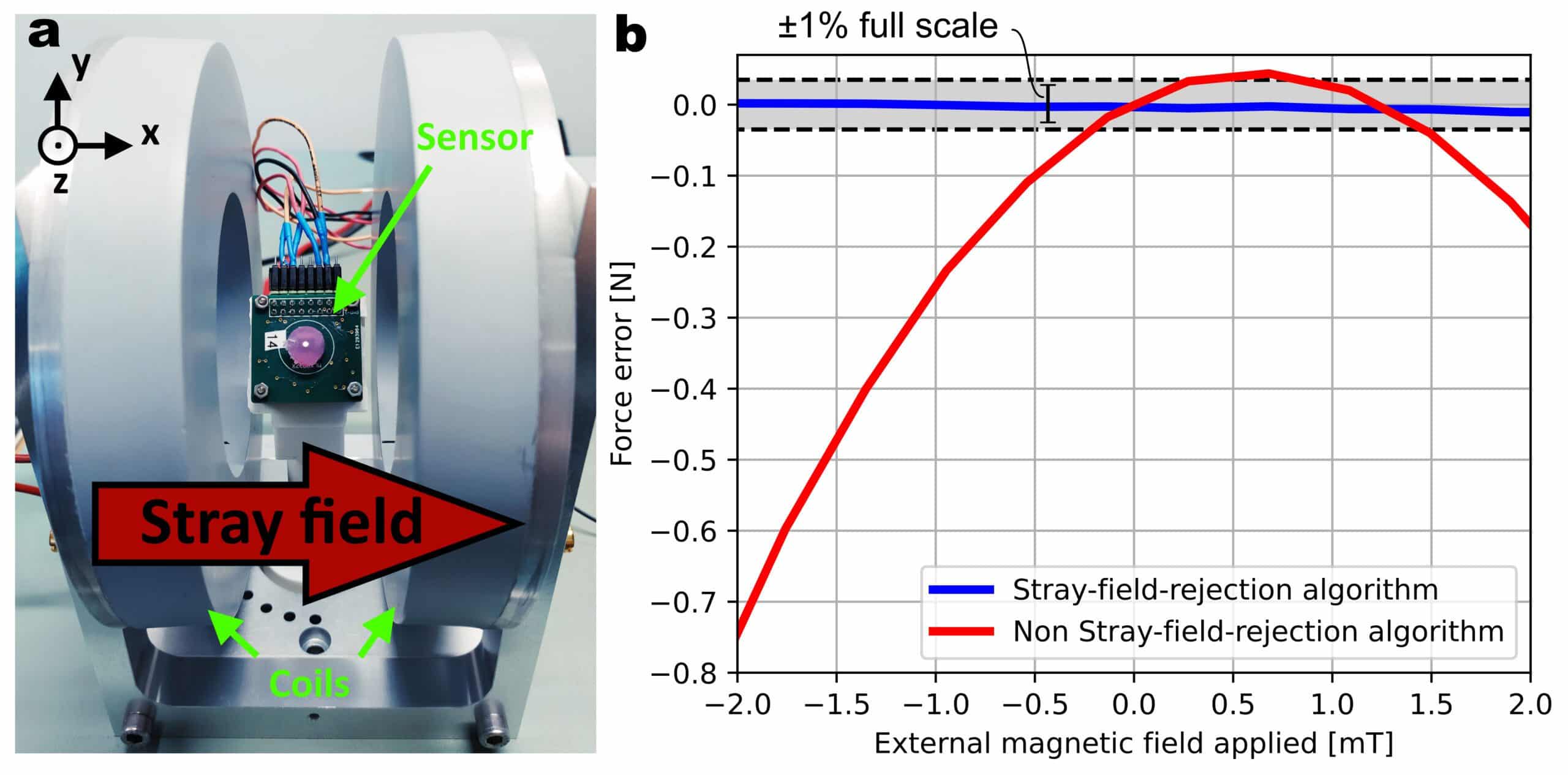
La fuerza medida por el sensor utilizando el concepto gradiométrico se muestra en la figura xb (curva azul), demostrando que el error de campo parásito se limita al 0,3% de la escala completa. A continuación, se reconfiguró el prototipo de sensor para que funcionara como un magnetómetro simple sin rechazo de campo parásito, emulando el comportamiento de los anteriores sensores de un solo píxel. El campo parásito se filtra directamente en la trayectoria de la señal sin rechazo, produciendo errores de hasta el 20% a -2mT (curva roja). Esto supone casi dos órdenes de magnitud más que el sensor gradiométrico.
Integración en la mano robótica
El prototipo de sensor Tactaxis se montó en una mano robótica comercial. Se implementó un algoritmo básico de control de fuerza para que la mano agarrara suavemente un globo. La figura 4 muestra el montaje de demostración.
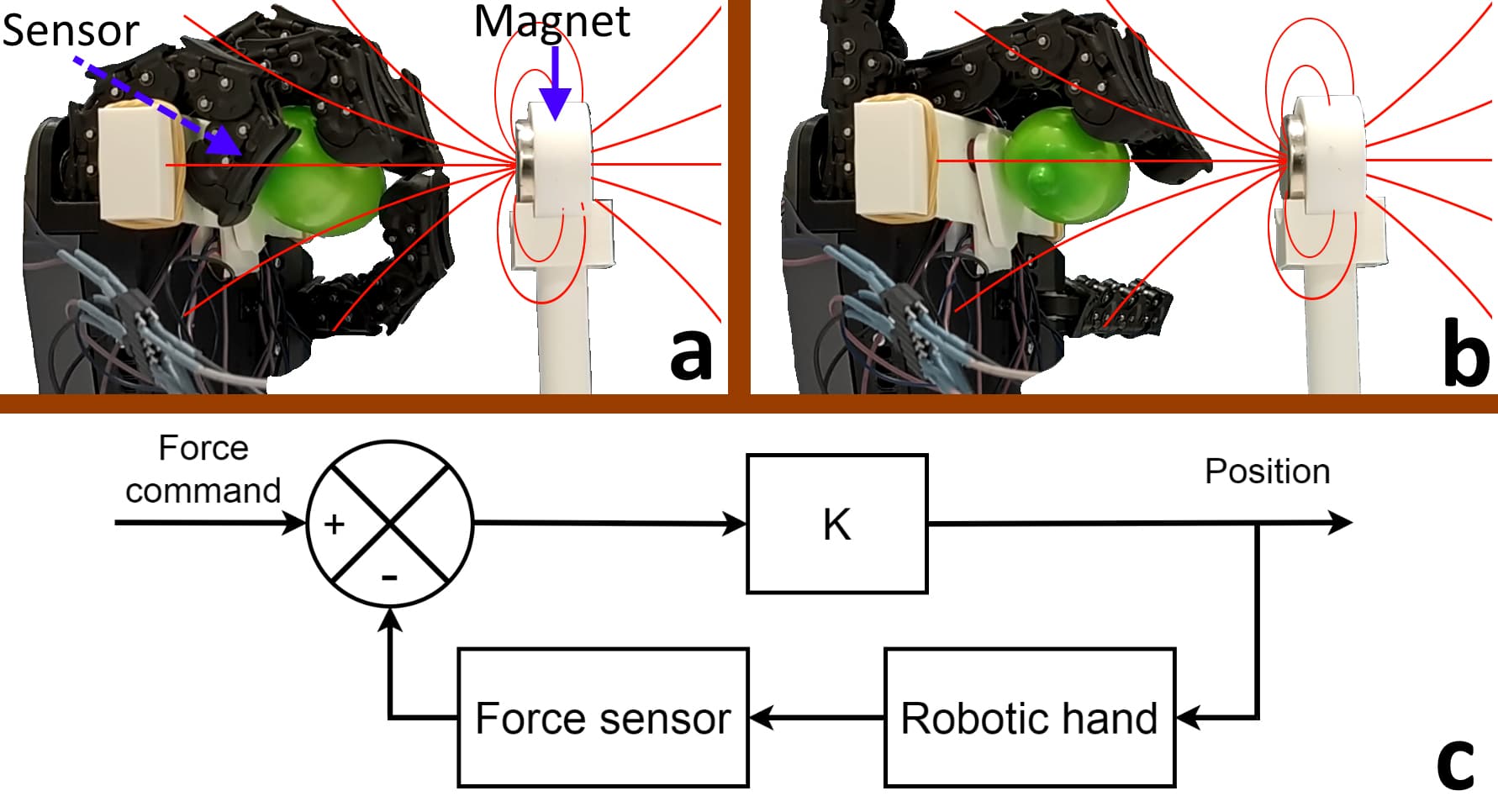
Utilizando el sensor como magnetómetro plano de un solo píxel, la fuerza está inicialmente bien regulada en ausencia de perturbaciones de campo parásito. La introducción de un campo parásito mediante un imán corrompió el sensor de fuerza, haciendo que la mano soltara o aplastara el globo en función de la polaridad.
Cuando se utilizó el sensor Tactaxis en su modo adecuado de multipíxeles, la fuerza se mantuvo correctamente regulada en todo momento, sin verse afectada por el imán que se acercaba hasta una distancia de unos pocos centímetros.
Resumen
La tabla que se muestra compara las propiedades del sensor Tactaxis multipíxel con los sensores de fuerza magnéticos, ópticos y piezoeléctricos de un solo píxel disponibles en el mercado
| Tecnología | Magnetómetro multipíxel gradiométrico | Magnético monopíxel | Óptico | Piezo-eléctrico |
| Detección de fuerzas | 3D | 3D | 3D | 1D |
| Escala completa Fz | 3.5N | 3.5N | 10N | 5N |
| Resolución Fz | 2.7mN | 2.5mN | 2.5mN | n/a |
| Inmunidad a campos parásitos | Si | No | Si | Si |
Tabla 1. Sensor gradiométrico comparado con otros sensores magnéticos, ópticos y piezoeléctricos.
El sensor magnético de un solo píxel es compacto y consigue una detección de vectores de fuerza en 3D con una resolución de vanguardia, especialmente en configuraciones de varios sensores. Sin embargo, la sensibilidad a los campos parásitos sigue siendo una limitación clave.
El sensor óptico es naturalmente inmune a los campos parásitos magnéticos y ofrece un rendimiento de detección de fuerza 3D similar. Aunque se trata de una función excelente para la integración de manos robóticas, los componentes ópticos discretos encarecen el coste.
Los sensores piezorresistivos tienen la ventaja de un factor de forma pequeño, del tamaño de un encapsulado de CI, y logran una resolución de fuerza competitiva, pero sólo pueden detectar la fuerza normal.
En cambio, el prototipo de sensor multipíxel Tactaxis ofrece las ventajas conocidas de los sensores magnéticos, es decir, detección de fuerza en 3D, suavidad, economía y compacidad, con una inmunidad superior a los campos parásitos del mundo real. Por lo tanto, este concepto de detección gradiométrica ha hecho avanzar la robustez de la detección de fuerza para aplicaciones robóticas.




