
Autor: Bryson Barney, Marketing de Producto, onsemi
Una fuerza impulsora de la Cuarta Revolución Industrial es la proliferación de robots y cobots para mejorar la eficiencia y la protección del creciente grado de automatización. Para asegurar el control preciso de las tareas, como la recogida y la colocación de objetos en una línea de montaje o garantizar la protección de los operarios, se debe medir con exactitud la posición angular en cada punto de rotación. De hecho, la exactitud de la funcionalidad de un robot se ve limitada en última instancia por la exactitud acumulada en cada unión móvil. Dado que pueden proporcionar una gran exactitud, los codificadores ópticos se utilizan con frecuencia en aplicaciones industriales para disponer de la posición rotacional. Sin embargo, los codificadores ópticos son caros, su lista de materiales es larga y su rendimiento se ve afectado por la presencia de contaminantes y vibraciones, que son comunes en los entornos industriales.
Por otro lado, los codificadores rotativos inductivos son inmunes a estos factores y son más económicos; no obstante, los codificadores inductivos no han venido ofreciendo generalmente el mismo nivel de rendimiento, de ahí que su aplicación se haya visto limitada sobre todo a la automoción ya que no necesita una gran exactitud. En este artículo revisaremos los principales indicadores de rendimiento de los codificadores rotativos antes de presentar un innovador sensor inductivo que ahora alcanza unos niveles de exactitud comparables a sus homólogos ópticos.
Selección de un codificador
Un codificador rotativo mide la posición angular de un eje y la convierte en un valor digital. Al seleccionar un codificador para una aplicación, los principales factores son resolución (en bits), exactitud (en arcseg), repetibilidad, latencia, velocidad (RPM) y tamaño del sensor (diámetro en mm). Conocer la relación entre las diversas tecnologías en las que se basan los codificadores facilitará su selección.
Resolución: La resolución viene determinada por el número total de códigos de posición para una revolución completa. Para un número finito de códigos en una rotación, el cambio de la lectura de una posición a la siguiente más cercana es por tanto el cambio más pequeño detectable de la posición. La resolución de un codificador absoluto se suele expresar en bits. Un malentendido habitual sobre los codificadores es que una resolución más alta mejora la exactitud del sistema. Es primordial saber que aumentar la resolución no incrementa necesariamente la exactitud. Es posible, y en general bastante probable, que un codificador tenga una resolución muy superior a su exactitud.
Exactitud: La exactitud de un codificador es una medida de la discrepancia entre el valor de salida del codificador y la posición real del eje que se mide. La exactitud del codificador se suele medir en grados, arco minutos o arco segundos. Los codificadores convencionales tienen una exactitud de unos 2,5 arco minutos (un tercio de un grado) o mejor, mientras que los codificadores de precisión de gama alta pueden ofrecer una exactitud de hasta 5 arco segundo (0,0014 grados). Muchas aplicaciones robóticas industriales exigen una exactitud de 50 arco segundo o incluso mejor.
Repetibilidad: La repetibilidad expresa el grado de uniformidad de un sistema para reproducir una medida cuando el eje recupera la misma posición tras otro movimiento. Toda diferencia para la misma posición física se mide como error de repetibilidad y se suele expresar en arco segundo.
Latencia: Otro parámetro que se debe tener en cuenta al seleccionar un codificador es el tiempo respuesta y la latencia del sistema. La latencia, que se suele expresar en microsegundos, es el intervalo de tiempo transcurrido desde que se empieza a medir una posición hasta que se transmite la posición calculada al controlador principal. En otras palabras, si el controlador principal pide la posición al codificador, ¿cuánto tarda en obtener una respuesta?
Velocidad: Dando el carácter finito del ancho de banda de la electrónica utilizada para detectar y procesar las señales procedentes del transductor del sensor, la velocidad de rotación de un eje se ve limitada para que las medidas de la posición sean exactas. Cuando el eje alcanza una cierta velocidad, la electrónica del sensor ya no puede mantener el ritmo.
Tamaño: El tamaño de un sensor de posición es un elemento importante en el proceso de selección del codificador ya que las diferentes aplicaciones finales presentan diversas restricciones de tamaño. Es importante destacar que la exactitud suele variar en función del diámetro del sensor.
Tipo de transductor: Los codificadores suelen utilizar transductores ópticos, inductivos o magnéticos para convertir la rotación angular en una señal eléctrica que se puede procesar y convertir en una medida digital. Los codificadores ópticos son los más exactos y los codificadores magnéticos son los menos exactos, mientras que la exactitud de los codificadores inductivos generalmente se ha situado entre los dos, pero con un solapamiento considerable en cada dirección. Cuanto mayor es la exactitud de un codificador óptico, mayor es su coste. Los clientes deben equilibrar los requisitos en cuanto a exactitud con el coste del sistema y otros factores como fiabilidad, facilidad de uso y mantenimiento para encontrar una solución óptima a sus necesidades.
Codificadores inductivos
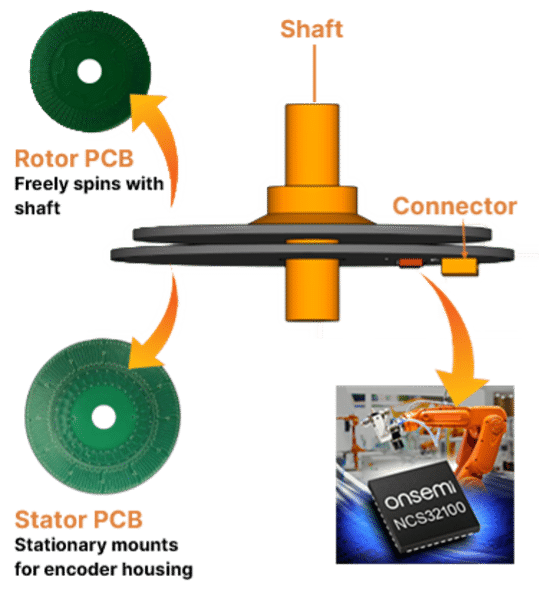
Los codificadores inductivos utilizan elementos metálicos en bobinas inductivas sobre placas de circuito impreso. Un codificador inductivo, de forma parecida a otros codificadores rotativos, contiene dos partes principales: un elemento fijo llamado estátor y un elemento móvil llamado rotor (el objetivo). El estátor está constituido por una bobina transmisora y dos o más bobinas receptoras. Las bobinas receptoras están impresas sobre la placa del circuito para generar señales que cambian en función de la posición del rotor. En muchos diseños, la circuitería electrónica para procesar la señal del sensor también está integrada en el estátor. El rotor no contiene ningún circuito activo y está hecho de un material ferromagnético o un sustrato con capas o tramas de un material conductivo como el cobre (p.ej., una placa de circuito impreso). Cuando circula una corriente AC por la bobina transmisora en el estátor se genera un campo electromagnético. Cuando el rotor pasa sobre el sensor se generan corrientes parásitas en la trama conductora de la superficie del objetivo. Estas corrientes parásitas crean un campo opuesto que modula la densidad del flujo entre el sensor y el objetivo, lo cual a su vez produce una tensión en las bobinas receptoras del estátor. Las amplitudes y las fases de las tensiones del receptor varían a medida que el objetivo rota respecto al estátor y ello permite calcular la posición del objetivo.
Los codificadores inductivos ofrecen varias ventajas importantes que los hacen deseables para aplicaciones industriales:
- Son insensibles a casi cualquier tipo de contaminación o interferencia, como líquidos, suciedad y polvo, campos magnéticos, EMI y fuertes vibraciones.
- Gracias a su baja sensibilidad a las vibraciones mecánicas, los codificadores inductivos pueden diferenciar entre traslación del rotor respecto al estátor y rotación del rotor respecto al estátor. Por ejemplo, pueden distinguir entre movimiento rotacional (que se mide) y vibración en el eje x, y o z (que puede ser rechazado).
- Robustez: los codificadores inductivos utilizan un acoplamiento inductivo entre toda la superficie del rotor y toda la superficie del estátor. Las bobinas de la placa de circuito deberían ser cortadas antes de que dejen de funcionar.
- A diferencia de los codificadores magnéticos, la detección inductiva no tiene una gran dependencia respecto a la temperatura. Por tanto, la exactitud y la repetibilidad de los codificadores inductivos frente a la temperatura son órdenes de magnitud mejores que la detección magnética.
Innovadora tecnología inductiva
Si bien las características de los codificadores inductivos hacen que resulten muy atractivos para aplicaciones industriales, su uso siempre se ha visto limitado a aplicaciones que no exijan un alto grado de exactitud (p.ej., < centenares de arco segundo) y cuya velocidad de rotación sea baja. El NCS32100 de onsemi es un nuevo sensor doble inductivo de posición rotativa que puede proporcionar la exactitud que suelen ofrecer los codificadores ópticos de gama media-alta en aplicaciones industriales de alta velocidad. Este innovador dispositivo, que usa una tecnología patentada, tiene ocho canales de señal que se pueden asignar de varias maneras para utilizar hasta ocho bobinas del estátor con el fin de proporcionar un posicionamiento fino.
Cuando se suma a las bobinas apropiadas del estátor y el rotor, el NCS32100 calcula las posiciones absolutas a altas velocidades y con una gran exactitud. El NCS32100, que mejora de largo a los codificadores inductivos más avanzados, ofrece una exactitud de 50 arco segundo o mejor a velocidades de hasta 6.000 RPM. Admite velocidades de hasta 100.000 RPM (con una menor exactitud) y en un sensor de alta integración que contiene un procesador Arm® Cortex®-M0+ con memoria Flash para almacenar los ajustes de la configuración. El NCS32100 ofrece un nivel de integración que lo convierte en una solución fácil de usar. Otras características valiosas son la detección de fallos para alertar si la carga en una batería de reserva es baja, si el sensor es disfuncional o si se detecta una temperatura excesiva. También integra una autocalibración rápida, para minimizar el tiempo de inactividad de la producción, que le permite compensar las asimetrías de la placa de circuito impreso. Esta calibración se caracteriza por ser automática y rápida, solo tarda 2 segundos y ello minimiza su repercusión sobre el tiempo de producción. Tiene una interfaz de programación fácil de usar y es compatible con varios sensores y placas de circuito impreso con diferentes diseños, formas, tamaños y formatos para que la flexibilidad de diseño sea máxima.
El NCS32100 lleva la detección de posición industrial al siguiente nivel
Los robots y cobots industriales exigen unos codificadores cada vez más robustos para proporcionar una detección de posición de gran exactitud y alta velocidad. Al disponer de una excelente inmunidad a las interferencias en una gran variedad de factores ambientales, los codificadores inductivos siguen siendo atractivos para estas aplicaciones industriales. Si bien su relativa inexactitud limitó en el pasado la adopción de codificadores inductivos electromecánicos complejos, el sensor de posición rotativa de onsemi ofrece ahora la solución óptima para detección rotacional en aplicaciones industriales. El sensor de posición rotativa NCS32100 de onsemi usa un nuevo método para detectar la posición de forma inductiva con el fin de superar las antiguas limitaciones y abrir la puerta a una nueva generación de codificadores de posición rotativa de gran exactitud en aplicaciones industriales de alta velocidad.




