Figura 1: Arquitectura simplificada del sistema para una aplicación AVP.
Autor: Pavol Polacek, especialista en tecnología inalámbrica de Anritsu.
Comunicación y conducción autónoma
Los vehículos autónomos incorporan sistemas que facilitan la detección y la toma de decisiones a nivel local a partir de los datos obtenidos sobre objetos cercanos. Esto se ve limitado por el alcance del sensor, los obstáculos, las malas condiciones meteorológicas o las intenciones desconocidas de otros conductores.
La integración de V2X (Vehicle-to-Everything) celular o 5G permite descargar la detección, el procesamiento y la toma de decisiones en sistemas externos que pueden ofrecer mayores niveles de funcionalidad y capacidad. Esto abre nuevas posibilidades para el despliegue de la conducción autónoma, dejando de lado las limitaciones de la detección y la computación a escala local.
Casos de uso de V2X
Los casos de uso de 5G y V2X son variados [1] y para que su despliegue tenga éxito es preciso superar muchas barreras de tipo técnico, económico, psicológico y regulatorio. A este respecto, algunos casos de uso, como la información y la difusión de peligros a nivel local, la conducción remota o el aparcamiento automático pueden ver simplificado su despliegue.
Aparcamiento automático de tipo 2
El aparcamiento automático o AVP (Automated Valet Parking) es un caso de uso que consiste en el aparcamiento automático del vehículo, de modo que el usuario no tenga que encargarse de esta tediosa actividad. AVP se implementará en un entorno de aparcamiento controlado en el que no existen muchos factores de riesgo relacionados con la conducción de vehículos autónomos.
Hay dos tipos de AVP que se diferencian por la ubicación de la inteligencia y el sensor [2].
Con el AVP de tipo 1, la inteligencia y los sensores se instalan en el vehículo. El vehículo se aparca a sí mismo por medio de sus propios sensores y de su capacidad de toma de decisiones. El inconveniente de este planteamiento es la variabilidad que experimenta la funcionalidad de los vehículos autónomos y la complejidad potencial que acarrea. Sin embargo, no requiere unas instalaciones de aparcamiento especializadas ni una infraestructura de comunicación.
El AVP de tipo 2 se diferencia en que los vehículos no han de ser autónomos ya que la instalación del aparcamiento es el componente inteligente. Los vehículos solo han de ofrecer la posibilidad de conducción remota y de comunicarse mediante 5G, que es el componente fundamental en una configuración AVP de tipo 2 y debe funcionar de manera fiable. Durante el resto del artículo, AVP se referirá al AVP de tipo 2.
Ventajas del AVP de tipo 2:
La complejidad técnica está en el lado del proveedor de servicios AVP, por lo que es más sencillo y barato de desplegar y mantener. Los potentes sensores se pueden instalar de forma sencilla y económica por medio de un servidor local o de computación distribuida multiacceso para manejar el procesamiento de las entradas del sensor y el cálculo de trayectorias.
El entorno en una instalación de AVP se puede controlar, por lo que hay que tener en cuenta menos variables.
Los requisitos de los vehículos certificados para AVP son más bajos ya que no necesitan sensores o ADAS.
La viabilidad económica está clara porque la inversión en capital y los gastos operativos son asumidos principalmente por el operador de la instalación, mientras que los ingresos provienen de las tarifas de aparcamiento pagadas por los usuarios.
Arquitectura e interfaces del sistema AVP
La arquitectura del sistema AVP está constituida por los componentes que manejan la instalación de aparcamiento, el control remoto del vehículo, la interacción con el usuario, etc. La Figura 1 muestra de forma simplificada una arquitectura del sistema para una aplicación AVP.
Los componentes de la arquitectura del sistema para una aplicación AVP son:
Sistema AVP: un sistema AVP se encarga de la infraestructura, como las puertas y los sensores. Gestiona la disponibilidad de plazas, comprueba la compatibilidad entre el vehículo y la instalación, poniendo el vehículo en modo de funcionamiento sin conductor, asumiendo para ello el control con el usuario. También recibe y procesa las entradas del sensor con el fin de calcular la trayectoria de la maniobra del vehículo. Además proporciona instrucciones a la app del OEM (fabricante de equipamiento original) en el vehículo por medio de la interfaz lógica del VMC (Vehicle Motion Control).
Servidor de aplicación o AS (Application Server) del OEM: ofrece servicios a los vehículos y a sus conductores y pasajeros a través de la app del OEM.
AS del usuario: este servidor de aplicación ofrece servicios a los usuarios finales por medio de la app del usuario; p. ej., instalada en el smartphone del usuario.
App del OEM: integra los servicios ofrecidos por el AS del OEM en los vehículos. Para el servicio AVP, asume el manejo a bordo del vehículo tras recibir las instrucciones de las maniobras por medio de la interfaz lógica del VMC.
App del usuario: proporciona los servicios ofrecidos por el AS de aparcamiento inteligente del usuario al usuario final.
Intercambio: se necesita para automatizar la detección de los aparcamientos inteligentes AVP y establecer las comunicaciones entre los AS inteligentes de AVP y los AS de los OEM.
Las interfaces lógicas importantes para AVP son:
Control de aparcamiento automático o AVPC (Automated Valet Parking Control): se usa para gestionar y controlar las comunicaciones entre servicios AVP, como autenticación, detección de servicios o reservas.
Control de movimiento del vehículo o VMC (Vehicle Motion Control): se usa para comunicar información de control de movimiento del vehículo (p. ej., comandos e instrucciones de conducción).
Funcionamiento de AVP
Veamos cómo funciona el AVP desde diferentes ángulos para entenderlo mejor. Desde el punto de vista del usuario, AVP facilita el uso del servicio, mejorando así el confort, siguiendo estas fases [3] [4]:
Detección de servicio AVP para que el usuario conozca la disponibilidad de una plaza de aparcamiento y la reserve.
Conducción hasta la instalación AVP y parada en la zona de entrega.
El usuario sale del vehículo y traspasa el control al sistema AVP.
Disfrutar de una película, tomar un vuelo o una actividad similar.
Al volver a la instalación AVP, el usuario solicita la devolución del vehículo a la zona de recogida.
El usuario asume de nuevo el control, accede al vehículo y se pone en marcha.
Desde el punto de vista del sistema AVP, vemos las siguientes fases:
Procesar la solicitud de aparcamiento y la reserva.
Asumir el control del vehículo y conducirlo entre la zona de entrega y la plaza de aparcamiento.
Aparcar de nuevo si es necesario, bien sea para optimizar el uso del espacio o para que el vehículo esté listo para ser recogido.
Conducir el vehículo hasta la zona de recogida y devolver el control al usuario.
Todas estas fases aparecen en la Figura 2, que muestra todo el procedimiento para todas las partes implicadas.
Figura 2: Secuencia de funcionamiento de AVP.
Comprobación de AVP
La configuración de prueba de AVP reproduce la arquitectura del sistema, prestando especial atención a la comunicación entre el sistema AVP y la aplicación del OEM para permitir su comprobación por completo.
La configuración de prueba se puede utilizar para:
Pruebas de interoperabilidad de implementación inicial en ambos extremos.
Comprobación del desarrollo y la integración del sistema del usuario y el vehículo, o el sistema AVP.
Conocer las diferentes maneras de configurar una instalación de aparcamiento. Por ejemplo, observando la calidad de servicio de la conexión siguiendo diferentes estrategias de despliegue de la red 5G o evaluando el efecto de la densidad y la calidad de los sensores sobre las prestaciones de la conducción remota.
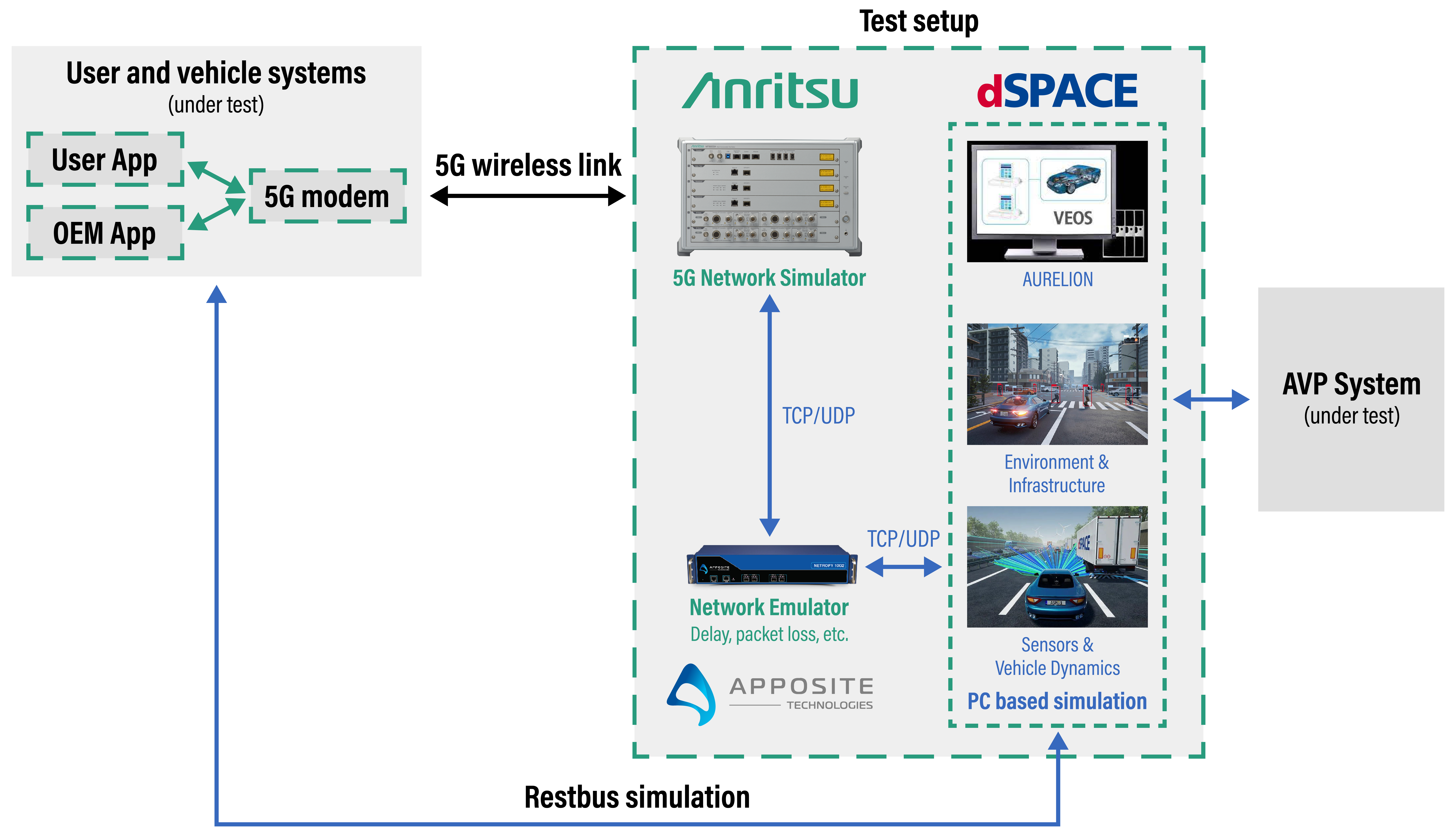
Configuración de prueba
La configuración de prueba ofrece un entorno escalable que se puede ampliar para efectuar todas las comprobaciones necesarias para evaluar el AVP. Los componentes de la configuración de prueba aparecen en la Figura 3:
Entorno de simulación basado en PC: simula la instalación de aparcamiento y el vehículo como gemelos digitales. Genera las señales del sensor, que se pueden introducir en el sistema AVP para su procesamiento, y refleja cualquier cambio de estado procedente del sistema AVP o del vehículo. Controla el simulador de red 5G y el simulador de problemas en la red, proporcionando una interfaz unificada para la automatización.
Simulador de red 5G: permite la comprobación con diferentes configuraciones de capas PHY/MAC/RLC y entornos de movilidad, como esquinas y entornos poco comunes.
El simulador de problemas en la red representa la red de transporte entre la instalación de aparcamiento y el sistema AVP en el caso de que no compartan ubicación. Puede simular efectos negativos como pérdidas de paquetes, jitter y latencia.
Figura 3: Configuración de prueba de AVP.
Sistema AVP, y apps del usuario y del OEM
Se trata de extremos que, o bien de comprueban, o sirven para proporcionar comunicación al sistema que se está comprobando:
El sistema AVP gestiona de la comunicación de la app del usuario. Recibe los datos de los sensores del entorno de simulación y los evalúa con el fin de calcular la trayectoria del vehículo y de generar los comandos del VMC que se enviarán a la aplicación del OEM por medio de la conexión 5G.
La aplicación del usuario se encarga de detectar y reservar la plaza de aparcamiento mediante la interfaz Uu 5G.
La aplicación del OEM recibe los comandos del VMC y los traduce en instrucciones a la dirección. Luego puede enviar la información al entorno simulado a través de Restbus.
Solución de prueba: MT8000A
El MT8000A de Anritsu es un simulador de sistemas 5G NR capaz de realizar comprobaciones de RF, protocolo y funcionales. Admite frecuencias desde menos de 6GHz hasta 43GHz (ondas milimétricas) con procesamiento de señal de banda ancha y tecnología de generación de haz.
El rendimiento, la latencia o las retransmisiones se pueden evaluar con diferentes configuraciones de capas PHY/MAC/RLC. Su arquitectura definida por software permite su ampliación para adaptarse a futuras tecnologías. Se puede automatizar de manera sencilla, facilitando así su integración con otros componentes.
Conclusión
AVP de tipo 2 es un caso de uso en el cual el vehículo se aparca automáticamente por control remoto en instalaciones de aparcamiento especialmente preparadas. El despliegue de un entorno controlado de este tipo reduce muchos factores de riesgo y facilita su adopción exitosa y generalizada. No obstante, antes de que esto ocurra es preciso comprobar todo el sistema de manera exhaustiva. La configuración de prueba presentada cuenta con todos los componentes necesarios, incluido un simulador de red 5G que permite comprobar todos los subsistemas.
Para ofrecer las mejores experiencias, utilizamos tecnologías como las cookies para almacenar y/o acceder a la información del dispositivo. El consentimiento de estas tecnologías nos permitirá procesar datos como el comportamiento de navegación o las identificaciones únicas en este sitio. No consentir o retirar el consentimiento, puede afectar negativamente a ciertas características y funciones.
Funcional
Siempre activo
El almacenamiento o acceso técnico es estrictamente necesario para el propósito legítimo de permitir el uso de un servicio específico explícitamente solicitado por el abonado o usuario, o con el único propósito de llevar a cabo la transmisión de una comunicación a través de una red de comunicaciones electrónicas.
Preferencias
El almacenamiento o acceso técnico es necesario para la finalidad legítima de almacenar preferencias no solicitadas por el abonado o usuario.
Estadísticas
El almacenamiento o acceso técnico que es utilizado exclusivamente con fines estadísticos.El almacenamiento o acceso técnico que se utiliza exclusivamente con fines estadísticos anónimos. Sin un requerimiento, el cumplimiento voluntario por parte de tu Proveedor de servicios de Internet, o los registros adicionales de un tercero, la información almacenada o recuperada sólo para este propósito no se puede utilizar para identificarte.
Marketing
El almacenamiento o acceso técnico es necesario para crear perfiles de usuario para enviar publicidad, o para rastrear al usuario en una web o en varias web con fines de marketing similares.