
Andrew Cole, Ingeniero de Aplicaciones, Anritsu
El desarrollo de las comunicaciones 5G es un punto de inflexión que permite a las redes de comunicaciones gestionar el tráfico en función de su prioridad y del ancho de banda que necesite. Cada una de sus aplicaciones, que se agrupan en tres categorías principales, exige un soporte diferente.
- eMBB (Enhanced Mobile Broadband) para proporcionar anchos de banda de hasta 20 Gbps.
- mMTC (Massive Machine Type Communications) que permiten conectar millones de dispositivos por kilómetro cuadrado.
- URLLC (Ultra-Reliable Low Latency Communications) para las aplicaciones más críticas, como vehículos automáticos, cuyas comunicaciones y decisiones inmediatas sobre el estado del tráfico y los posibles peligros es fundamental.
Las aplicaciones de seguridad crítica, como los vehículos automáticos o la robótica, necesitan unas comunicaciones inmediatas, rápidas y garantizadas, mientras que otras como los mensajes de texto o los correos electrónicos pueden admitir un cierto retardo. Entre ambos grupos hay varias aplicaciones con diversos requisitos en cuanto a latencia, ancho de banda y garantía de servicio.
Gestionar la sincronización del tiempo, la frecuencia y la fase es uno de los requisitos fundamentales para asegurar el correcto funcionamiento de la red.
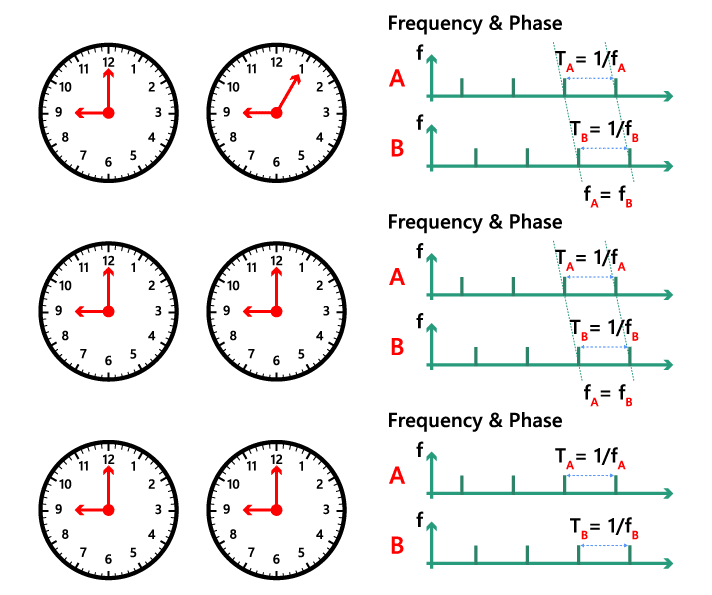
La Figura 2 muestra tres ejemplos de la relación entre tiempo, frecuencia y fase de dos relojes: A y B. En cada caso ambos relojes miden el paso del tiempo a la misma velocidad, por lo que la frecuencia está sincronizada.
En el ejemplo de arriba, los dos relojes muestran una hora distinta y en el diagrama de frecuencia y fase correspondiente de la derecha existe un retardo de fase entre A y B. Si bien el tiempo transcurre de forma correcta, la hora anunciada es incorrecta y el paso de cada segundo no coincide.
En el ejemplo del centro, la hora de los relojes A y B es la misma pero sigue habiendo un error de fase entre ambos relojes. El paso de cada segundo sigue sin coincidir.
Para que la red de comunicaciones funcione correctamente y garantice el nivel de servicio exigido por URLLC es preciso que ciertas operaciones se realicen exactamente en el momento adecuado. Por tanto, tiempo, frecuencia y fase deben estar sincronizadas tal como muestra el tercer ejemplo. La mayoría de las redes de enlace terrestre de comunicaciones móviles utilizan una combinación de Ethernet síncrona (Sync E) y PTP (Precision Time Protocol) IEEE 1588 para gestionar la sincronización de frecuencia, tiempo y fase.
Sync E
Sync E se define en el estándar ITU-T G.8261 los aspectos de temporización y sincronización en las redes de paquetes, destacando los requisitos para la transferencia de una señal de reloj rastreable hasta un reloj externo estándar junto con los datos mediante la capa física de Ethernet.
En las arquitecturas típicas Sync-E habrá un Reloj Primario de Referencia en una de las tres posiciones, bien sea en el centro, en los puntos de acceso multiservicio o en la función interfuncional más cerca del equipo del cliente. Dado que el equipo de red Ethernet puede transferir la señal de reloj, disponer de relojes primarios de referencia en el centro disminuye el número de relojes y facilitar que se mantenga la sincronización de la red. La instalación de relojes primarios de referencia más cerca del cliente puede aumentar el número de relojes, permitiendo así que “vea” más de un reloj. Para determinar cuál es el reloj primario de referencia necesitamos información sobre el estado del reloj, su exactitud y el tipo de reloj.
Un mensaje SSM (Synchronization Status Message), que contiene información sobre el tipo de reloj stratum y su nivel de calidad, forma parte de un canal ESMC (Ethernet Synchronization Messaging Channel). ITU-T G.8264 exige transmitir el ESMC a intervalos regulares, generalmente uno por segundo, y proporciona la información necesaria para mantener una buena sincronización. Si cambia el nivel de calidad se envía de inmediato un ESMC para anunciar el cambio. Es primordial comprobar que se envían los niveles de calidad correctos en el ESMC a intervalos regulares ya que un fallo en esta comunicación puede provocar el fallo de la red.
PTP
Sync E solo se ocupa de la sincronización de frecuencia, pero los sistemas modernos de comunicaciones como 5G también necesitan sincronizar tiempo y fase. Estos requisitos quedan cubiertos por el protocolo PTP (Precision Time Protocol). PTP distribuye señales de tiempo sincronizadas a los equipos de la red y permite introducir pequeñas correcciones en el error de tiempo (Time Error, TE) calculado. Se usa en diversas aplicaciones, como telecomunicaciones y comunicaciones celulares, cuya calidad de sincronización se debe confirmar en cada estación base.

Dado que no todas las aplicaciones necesitan el mismo grado de exactitud, existen diferentes perfiles de PTP que ofrecen definiciones estándar apropiadas para diferentes aplicaciones. Hay dos perfiles de PTP definidos en redes telecomunicaciones. G.8275.1 se utiliza para sincronización de fase/tiempos en total coordinación con la red, bien sea con relojes de frontera o relojes transparentes instalados en cada nodo. G.8275.2 contempla la sincronización únicamente cuando se puede mantener desde la red de manera parcial. Describe cómo se debería transferir la sincronización de PTP cuando los equipos de la red no pueden reenviar datos sincronizados, por ejemplo allí donde se acumulen.
El protocolo está formado por una serie de paquetes que transfieren información sobre tiempo, y que constituyen la base de cualquier corrección de TE que se necesite. Cada terminación de la red adopta una relación primaria/secundaria dentro de una jerarquía en cuya punta se encuentra el reloj primario (T-GM). La mayoría de los operadores emplean un modo PTP de dos pasos, que se diferencia respecto al de un paso en que incluye un mensaje de seguimiento, como se puede ver a continuación.
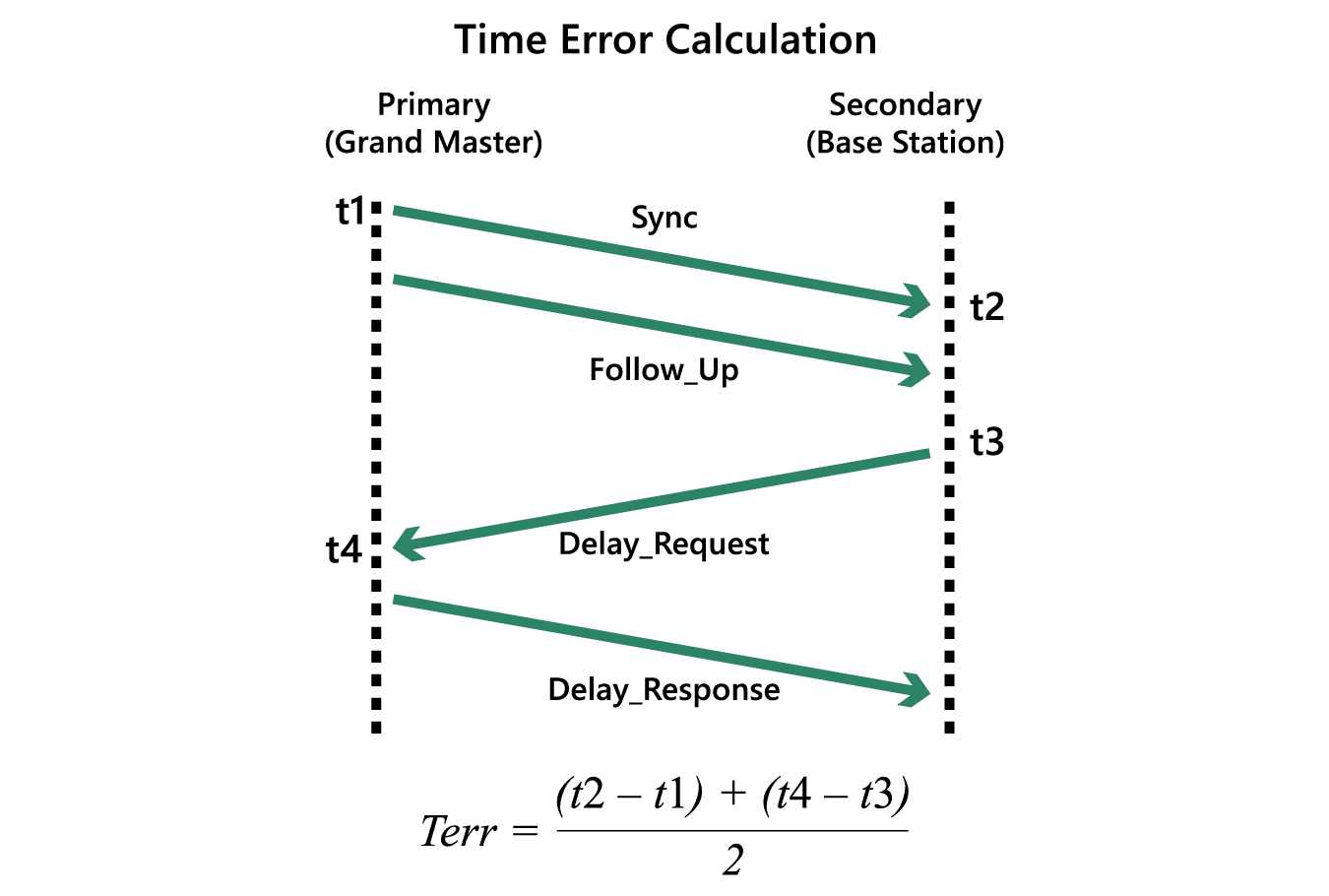
El reloj primario envía un mensaje de sincronización “Sync” al secundario que contiene la “hora del día” registrada por el reloj primario. El reloj primario envía a continuación un mensaje de seguimiento “Follow Up” con registro de hora en hardware que ofrece la hora exacta en que fue transmitido el mensaje de sincronización anterior. El reloj secundario usará este mensaje para sincronizar su hora actual con más exactitud.
El reloj secundario envía luego una solicitud de retardo “Delay Request” al reloj primario. Tras recibirla, el reloj primario envía de inmediato una respuesta de retardo “Delay Response” para informar al reloj secundario a qué hora se recibió la solicitud.
El reloj secundario calcula entonces el retardo de ida y vuelta a partir de la diferencia entre los mensajes de solicitud y de respuesta. El reloj secundario ajusta ahora su propia hora para sincronizarla con el reloj primario.
Cuando los relojes están a menos de un segundo el uno del otro, el reloj primario ordena al reloj secundario que ajuste su frecuencia para mantener la exactitud.
1PPS
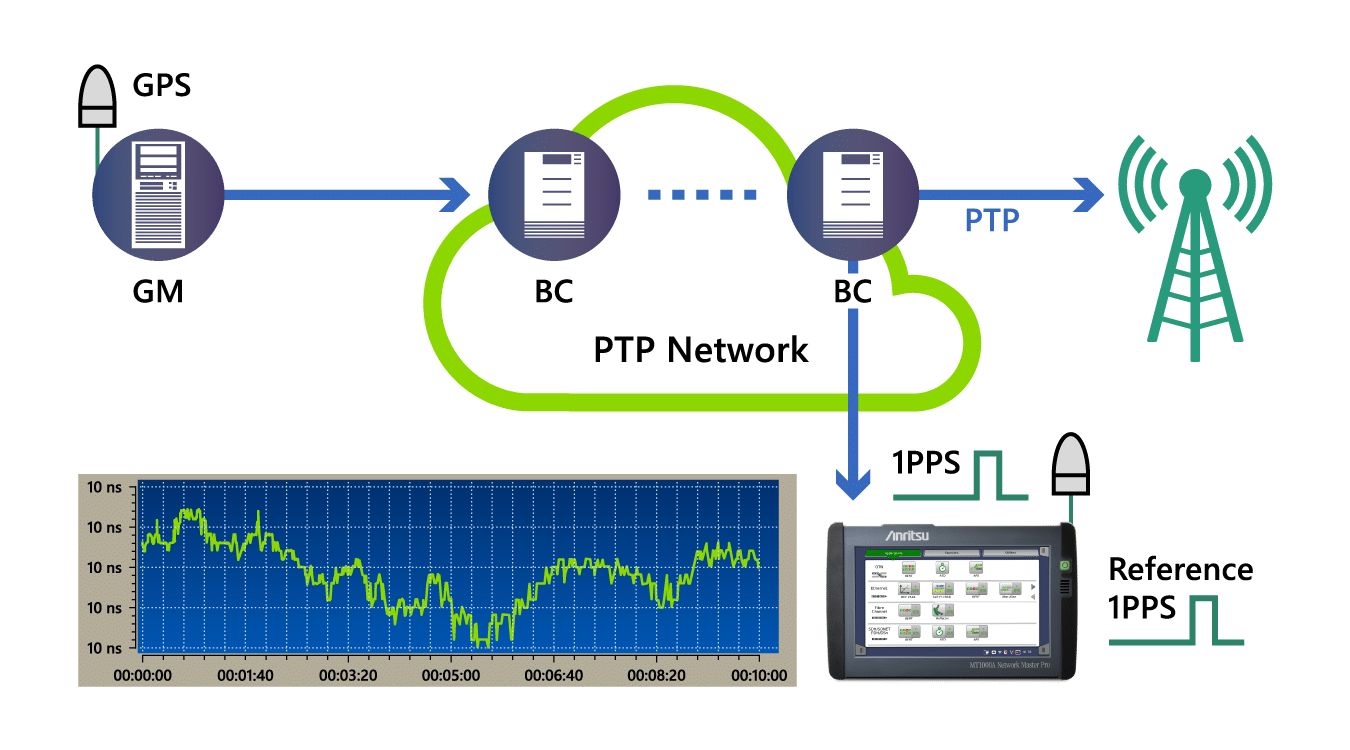
Un T-GM sincronizado a un sistema de navegación global por satélite GNSS (Global Navigation Satellite System) funciona como reloj primario de referencia (Primary Reference Time Clock, PRTC) y proporciona la hora de referencia la que se sincroniza el resto de la red. La hora de referencia que llega al receptor se verá afectada por el retardo de propagación por el cable de la antena de la antena GNSS. El T-GM compensa el retardo de propagación del cable de la antena a unos 5 nanosegundos por metro, aproximadamente.
Un T-GM generalmente proporciona por separado una referencia de tiempo precisa de un pulso por segundo (One Pulse Per Second, 1PPS). Esto está directamente relacionado con la frecuencia y la fase del reloj y se puede medir para confirmar que el T-GM funciona y está configurado de manera correcta. Se recomienda realizar en primer lugar as medidas del 1PPS ya que un error en el T-GM provocaría que toda la red dejara de estar sincronizada.
Disponibilidad de tiempo
El TE se acumula a medida que la señal de reloj se mueve por la red desde el PRTC. La disponibilidad de TE se indica en el estándar ITU-T G.8271.1, que incluye asignaciones para TE en las diferentes etapas de la red.
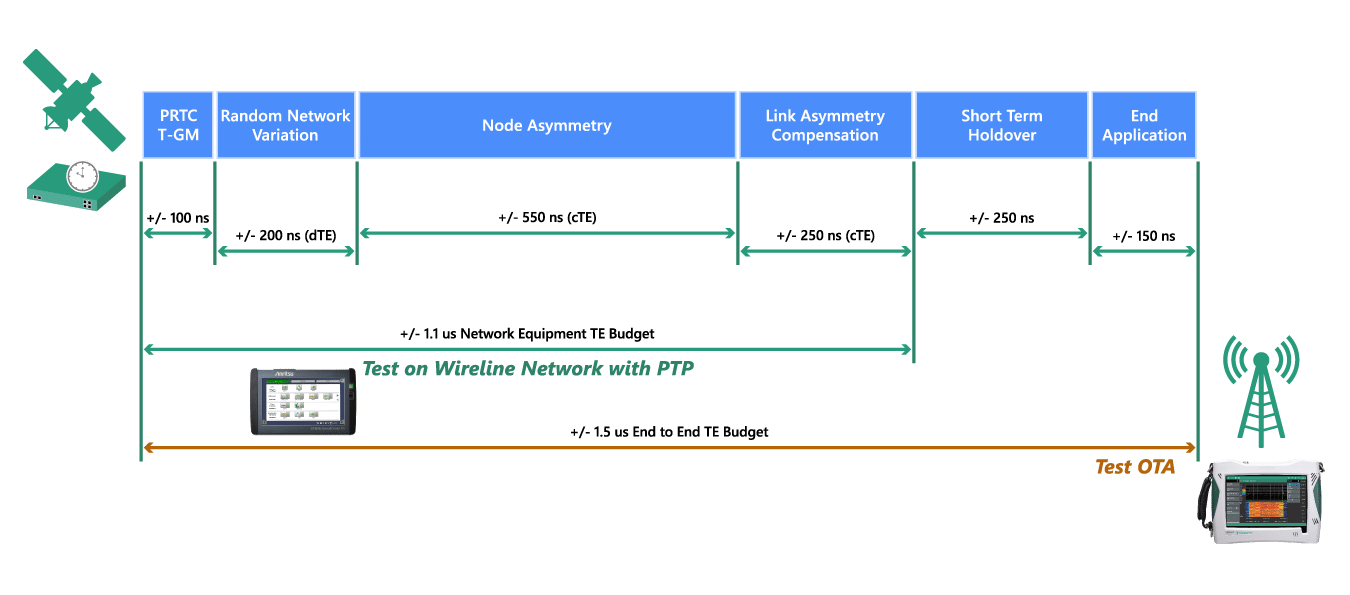
Se reserva un tiempo de 400 nanosegundos para tiempos remanentes a corto plazo y para el TE de la aplicación final, entre el equipo de radio y el equipo del usuario (User Equipment, UE), es decir, un smartphone, una tablet, etc. Se permite un TE máximo de 1,5 microsegundos entre el PRTC y el UE, por lo que se admite un máximo de 1,1 microsegundos entre la red y el equipo de radio. El diagrama anterior muestra cómo se reserva el TE disponible en la red.
La medida inalámbrica de TE proporcionará un TE total para la instalación. No obstante, una gestión de TE con confianza exige comprobarlo con un equipo que emula lo componentes que integran la red.
Prueba de sincronización
Comprobar la sincronización en redes de enlace móvil terrestre requiere equipos de prueba con una fuente de reloj interna coordinada con el GNSS y con una exactitud del orden de nanosegundos. Un oscilador de rubidio o cesio es el método que se suele utilizar. El comprobador necesita emular el equipo de la red para comprobar las funciones de sincronización de Sync-E y PTP en los modos tanto del reloj primario como del reloj secundario.

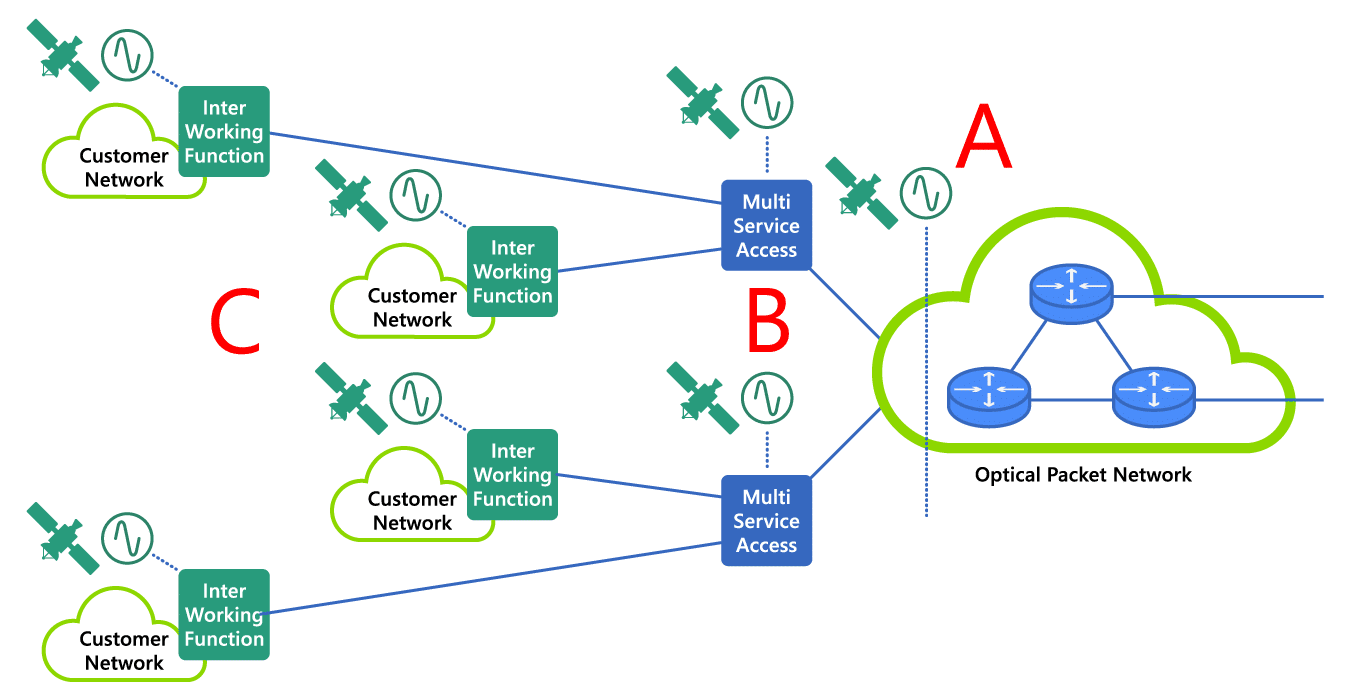
En el caso “A”, el equipo de prueba destina un puerto a emular el reloj primario además de medir simultáneamente el grado de sincronización de dispositivo/red, mientras que el segundo puerto funciona en modo de reloj secundario. Si estos puntos se hallan muy separados se pueden utilizar dos comprobadores, ambos sincronizados al GNSS.
En el caso “B”, ambos puertos se han configurado para emular el reloj primario, lo cual puede ser práctico durante la instalación de la red o en un laboratorio, donde no es fácil acceder al reloj primario de referencia.
Una vez finalizada la instalación de la red y con la sincronización de tiempo ofrecida por el reloj primario, es preciso comprobar la sincronización en toda la red, verificando para ello en primer lugar que se han introducido los ajustes correctos en el reloj primario. Los procesos de gestión del tiempo se comprueban entonces para determinar el funcionamiento correcto, y que la frecuencia, la fase y el tiempo estén sincronizados de acuerdo con los establecido en los estándares. Esto se puede ver en el caso “C”.
OWD
Para tomar medidas de sincronización, el comprobador emula un reloj secundario y permite que el reloj del sistema funcione como reloj primario. El comprobador calcula la diferencia de tiempo entre el mensaje de PTP enviado y recibido a partir de los registros exactos que incluyen los paquetes de PTP. Esto se puede observar como un retardo unidireccional (One-Way-Delay, OWD).
El OWD en tiempo real se calcula para cada mensaje de sincronización (Sync), seguimiento (Follow Up) y de solicitud de retardo (Delay Request). El resultado mostrado se obtiene varias veces por segundo. La tasa de repetición suele ser 16 pero se puede fijar otro valor.
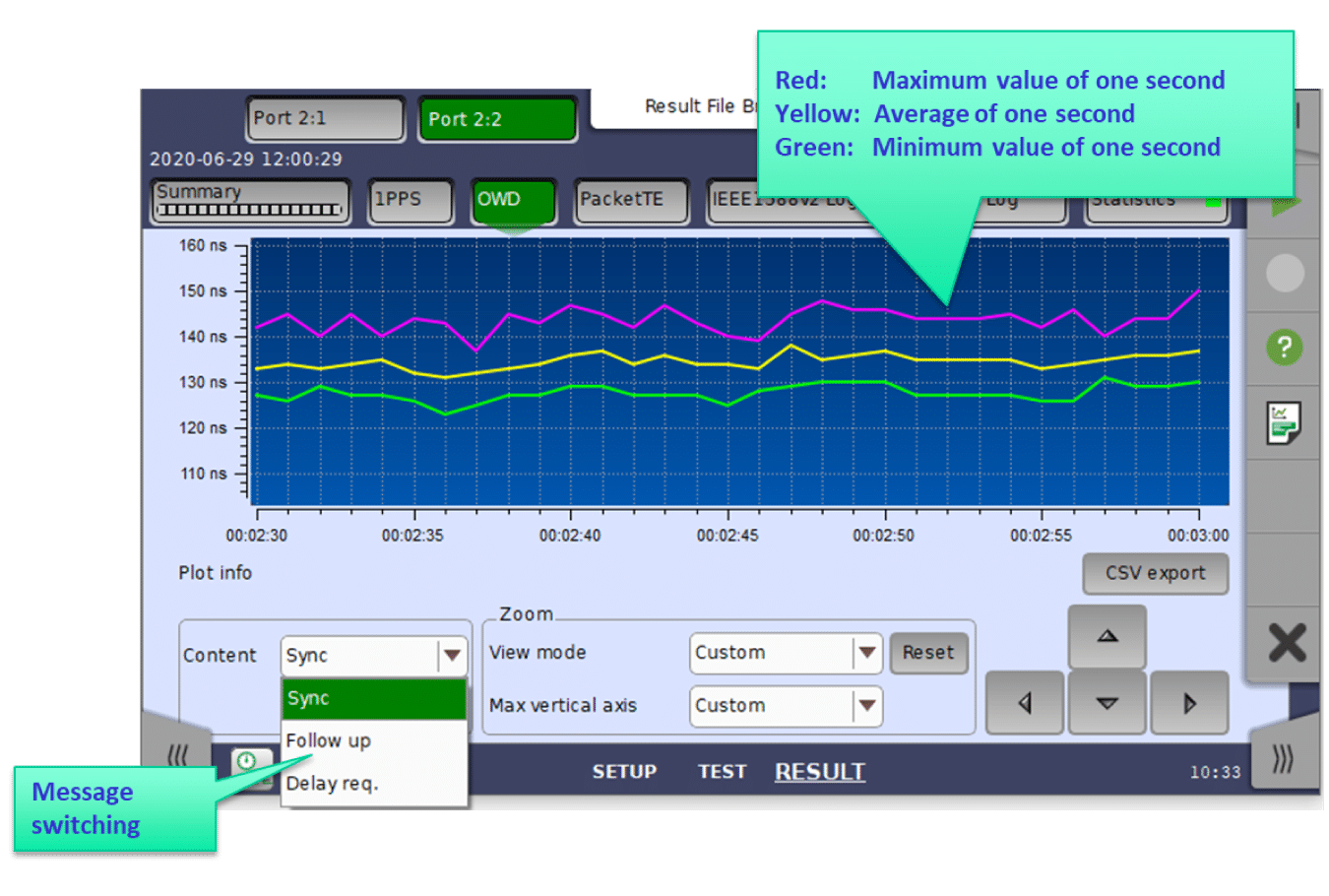
En la pantalla del comprobador mostrada arriba, la línea roja indica el valor máximo observado de los 16 ciclos de PTP, la línea verde indica el mínimo y la línea amarilla es el medio calculado para los 16 ciclos durante ese segundo. Los resultados se registran y también se pueden exportar en formato CSV para su análisis posterior.
El OWD para los mensajes de sincronización (Sync) y solicitud de retardo (Delay Request) incluye el retardo de propagación de los cables Ethernet, que supone aproximadamente 5 nanosegundos por metro de retardo añadidos a la medida. Por tanto, se calculan los errores de tiempo de paquete constantes (Packet Time Errors) cTE1 y cTE4 para el resultado de OWD menos el retardo de propagación del cable Ethernet.
Resumen de errores de tiempo de paquete
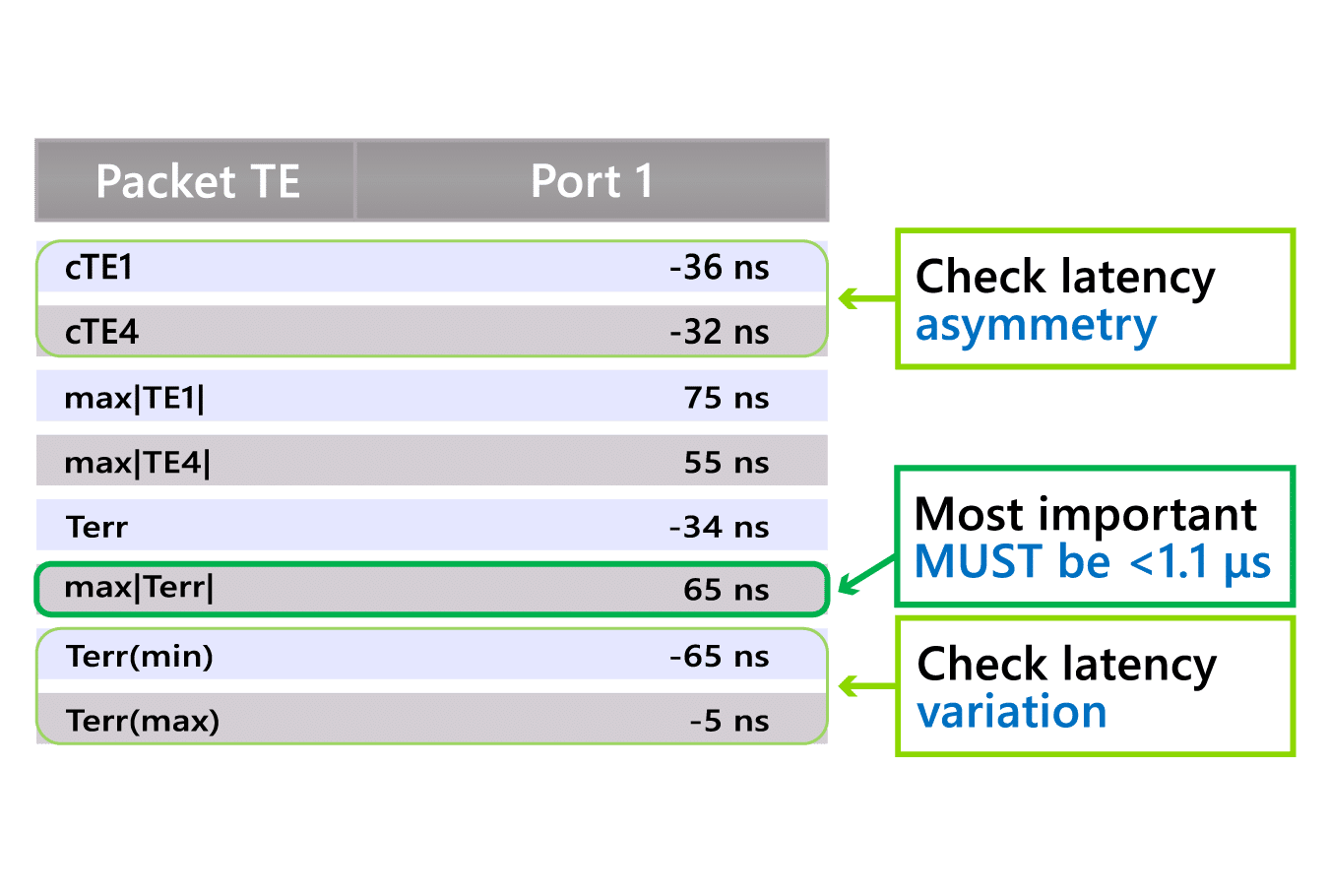
Una pantalla de resumen con los resultados de alto nivel permite verificar rápidamente la buena sincronización y alerta en el caso de que haya algún problema. El valor más importante es el error de tiempo máximo (max|Terr|), que indica el peor caso posible. cTE1 y cTE4 equivalen a la latencia en cada dirección e indican la asimetría, por lo que es deseable que estos valores sean casi iguales.
Resumen de la red IEEE 1588
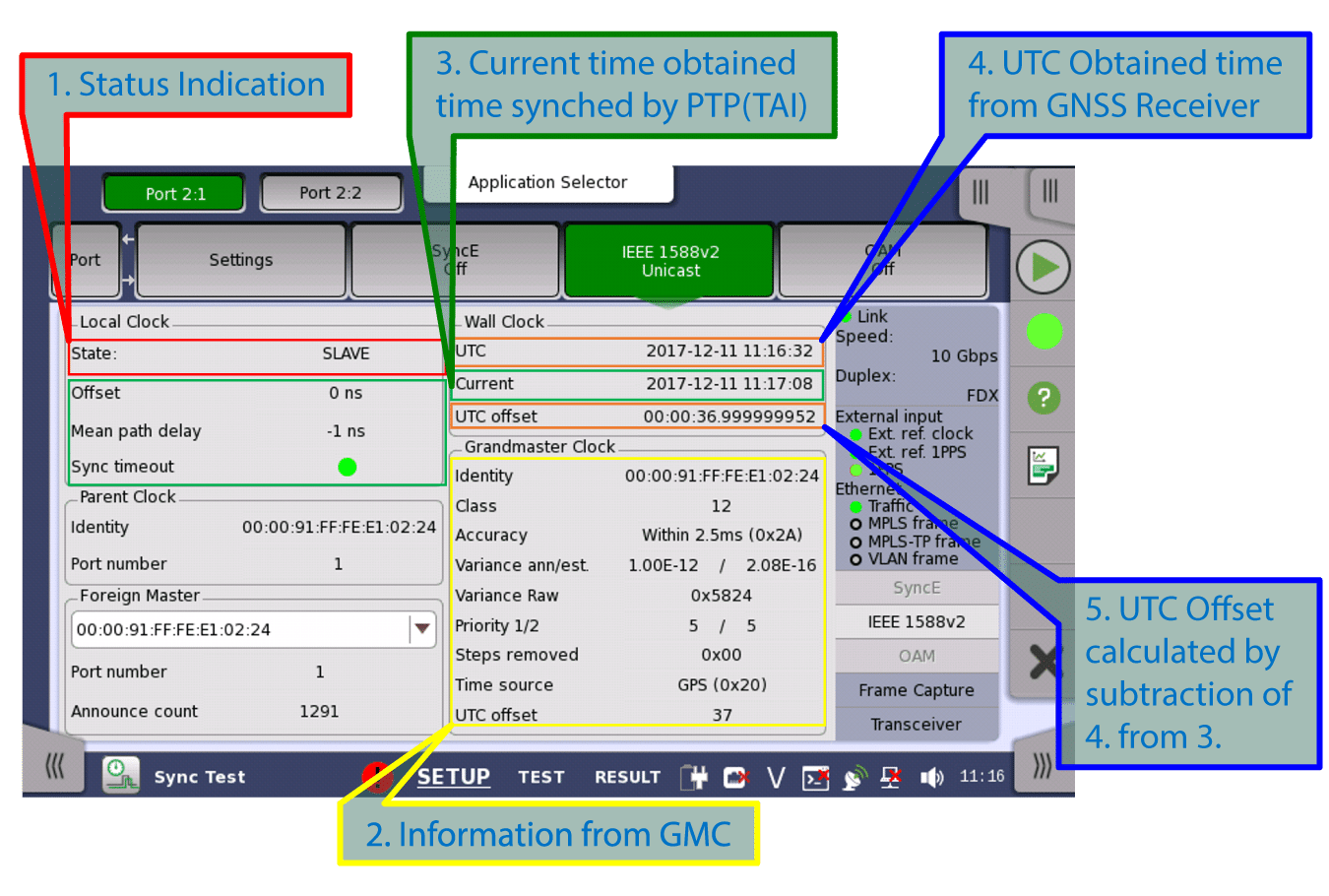
La pantalla de resumen de IEEE 1588v2 el comprobador ofrece la información adquirida sobre los diferentes relojes de la red. Muestra las direcciones MAC del reloj primario, los relojes padre y primario externo, permitiendo así que el operario verifique que el tiempo se obtiene del lugar correcto. También proporciona información sobre el reloj primario, su clase de reloj, prioridad, exactitud, etc.
El estado del reloj local, su offset y su retardo medio de conexión (Mean Path Delay) verifica la sincronización, mientras que un LED de límite de tiempo de sincronización (Sync Timeout) de color verde indica que el reloj local está sincronizado con el reloj primario. Es necesario aplicar una corrección para el tiempo universal coordinado UTC (Universal Time Clock). Un PRTC se ha de corregir en función de UTC, actualmente 37 segundos, y el ajuste de esta corrección se debe verificar.




