
Autor: Bill Schweber para Mouser Electronics
Los ingenieros reciben con frecuencia el consejo de no dejar ningún elemento del diseño para el final. No cabe duda de que es una sugerencia muy sensata, pero no siempre es realista; a veces, hay cosas que deben hacerse al final y no siempre es factible determinar todos los factores cuando empezamos el proceso de diseño.
De todos modos, aunque quizá no todos los detalles puedan concretarse desde el principio, es aconsejable tenerlos presentes. Un buen ejemplo de esto es el cableado, tanto de señal como de alimentación, en los sistemas robóticos. En las primeras fases del diseño, existen numerosos factores adicionales que suelen tener prioridad, como los elementos mecánicos más importantes, los motores, la capacidad de carga, la precisión y repetibilidad, los objetivos de rendimiento, el coste, el montaje, etc. Como muestra de que el cableado no suele ser lo más importante, solo hay que ver las fotos que se suelen presentar de los robots: imágenes elegantes y futuristas en las que no aparecen los cables.
Uno de mis mentores en mi carrera ingenieril me dijo hace ya muchos años que no debemos pensar en los cables y conectores como si fueran una parte insignificante del diseño. Son mucho menos visibles que otros elementos, pero pueden ocasionar muchos problemas eléctricos y mecánicos, tanto si son de señal como de alimentación. Por lo tanto, debemos tratarlos con el debido respeto durante el diseño.
Este consejo es aplicable al cableado en todos los diseños: desde los cables básicos de alimentación en CC o CA hasta el espectro electromagnético, la radiofrecuencia o los enlaces ópticos, así como a los cables con señales de control o de nivel bajo para sensores, que se suelen colocar junto con los tendidos de potencia (imagen 1). En la robótica, nos encontramos con un problema adicional: el cableado debe ser lo suficientemente flexible como para soportar el movimiento y los giros, así como lo suficientemente resistente como para soportar una flexión continua en entornos que suelen ser muy exigentes. Además, los cables no pueden fallar en ningún momento, y tampoco deben enrollarse ni entorpecer el sistema global de ningún modo. Tener todo esto en cuenta en el diseño no es tarea fácil.
Imagen 1. El tendido completo de cables para un sistema robótico incluye los cables de alimentación para los motores y los cables de baja señal para el control de los motores, los sensores y la conectividad; además, los conectores en los extremos deben ser suficientemente resistentes (fuente: Arbystudio/stock.adobe.com; generada con IA).
El grado de dificultad del cableado también estará determinado por el tipo y el tamaño del mecanismo del robot. Puede tratarse de una pequeña unidad de sobremesa y funciones limitadas, como cargar viales médicos en una cámara de pruebas, un pórtico elevado que solo se mueve en ejes cartesianos (X/Y) o hasta una unidad de seis ejes o seis grados de libertad (6DOF), que ofrece el nivel de movimiento y flexibilidad más cercano que existe al brazo humano (imagen 2).
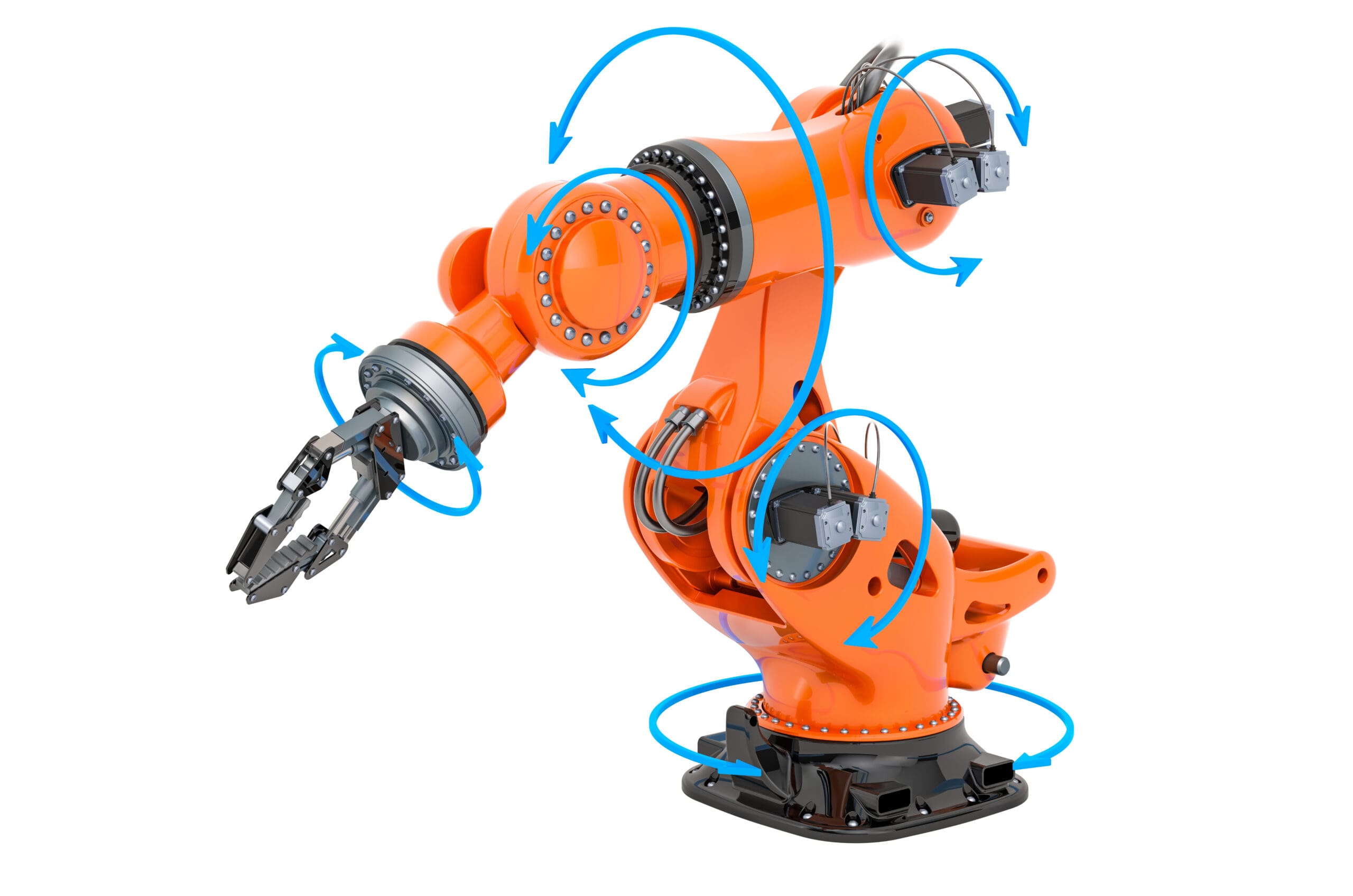
Imagen 2. El estándar de robot más complejo es la unidad de seis ejes, que imita el movimiento del brazo humano; la imagen muestra los seis ejes, cada uno con su motor, y las designaciones de estos ejes y del movimiento que crean (fuente: natatravel/stock.adobe.com).
Teniendo en cuenta todo esto, la tarea de plantear y diseñar el cableado puede parecer un reto mayúsculo. Sin embargo, la situación actual es mucho mejor que en el pasado, cuando el mundo de la robótica estaba dominado por unidades hidráulicas; afortunadamente, en la mayoría de los casos, estas han sido sustituidas por unidades eléctricas. En el contexto hidráulico del pasado, el trazado de las mangueras generaba muchos problemas y una ruptura en las mangueras, o hasta una pequeña fuga, provocaba un desastre medioambiental. Además, era necesario disponer de un compresor externo para la presurización, así como emplear a un técnico hidráulico, además del eléctrico, para la instalación y el mantenimiento. No es de extrañar que los robots eléctricos se hayan impuesto.
Los problemas de la robótica hidráulica han quedado ya en el pasado, pero han aparecido nuevas complicaciones relacionadas con el cableado eléctrico, en particular con los hilos de cobre, la protección de los cables y la gestión del cableado.
Filamentos y cables de cobre
Al utilizar cables de cobre, es necesario elegir cuidadosamente el calibre, el trenzado y los conectores, tanto para alimentar los motores como para llevar las señales de bajo nivel. El cableado de potencia viene determinado por la tensión y la intensidad del motor; para los cables de control, señal o comunicaciones, las características estarán regidas por directrices no oficiales o por normativas formales (bucle de corriente, Ethernet, etc.). También hay normativas eléctricas relacionadas con el aislamiento. La mayoría de los sistemas también necesitan cables para señales, como las de los sensores en motores, los sistemas de visión, los sensores de presión o las galgas extensiométricas.
Normalmente, todo el cableado deberá estar protegido por un blindaje trenzado para evitar que haya interferencias electromagnéticas (EMI, por sus siglas en inglés) y para minimizar otros tipos de interferencias. Además, algunos de los cables tendrán su propio tipo de blindaje para ajustarse a la normativa aplicable en cada caso.
El uso del blindaje nos presenta un dilema. Por un lado, el roce continuo entre el blindaje y el aislamiento del cable es una causa potencial de averías a largo plazo. Sin embargo, no podemos, sencillamente, eliminar esta capa adicional de protección, ya que nos encontraríamos con dos problemas. En primer lugar, el sistema robótico sería mucho más sensible a la EMI y a la interferencia de radiofrecuencia (RFI). En segundo lugar, el propio robot se convertiría en una fuente de EMI y RFI, lo que podría tener un impacto negativo en la electrónica y las funciones de los equipos cercanos.
Cuando, debido a los problemas de interferencia bidireccional, no es posible utilizar cables sin blindaje y de gran flexibilidad, existe una solución: hay proveedores que ofrecen cables especiales como elementos estándar, con un blindaje trenzado de tal modo que la torsión queda absorbida, principalmente, por elementos deslizantes y de amortiguación entre la cubierta, el blindaje y el aislamiento.
Protección básica para cables
Además de seleccionar el aislamiento y los conductores de cobre adecuados de acuerdo con los requisitos eléctricos, es necesario tener en cuenta muchos factores mecánicos.
- Resistencia a la tracción: la capacidad del cable de aguantar que tiren de él sin romperse.
- Flexibilidad: la capacidad para doblarse con facilidad sin sufrir daños.
- Durabilidad: la resistencia del cable al desgaste y a los factores ambientales, como la temperatura, la humedad o los productos químicos.
- Resistencia a la abrasión: la capacidad de soportar el desgaste en la superficie causado por la fricción.
- Resistencia a la fatiga: la capacidad del cable de soportar la flexión y la torsión constantes sin estropearse.
- Radio de curvatura: el radio mínimo al que se puede doblar el cable sin que se dañe.
- Tensión máxima de tracción: la fuerza máxima que se puede aplicar a un cable durante la instalación sin que se dañe.
- Presión sobre las paredes laterales: la presión ejercida en las paredes del cable durante la flexión, lo que puede afectar a su rendimiento y duración.
- Desgaste por uso a largo plazo: los ciclos de vida de los cables de gran rendimiento pueden tener un uso nominal, como 4 años o 40 millones de ciclos de doble carrera.
Protección en la gestión del cableado
En los sistemas de cadenas portacables de la robótica, hay muchos factores que debemos tener en cuenta, como los siguientes:
- Los cables deben moverse en un trazado suave y sin interrupciones.
- Los cables no pueden quedar flotando, sino sujetos adecuadamente.
- El radio de curvatura debe ser suficientemente elevado como para que los cables no queden apretados o pellizcados.
- Debe haber un acceso sencillo a los cables para cuando sea necesario cambiar o añadir algo.
- Debe haber una cubierta totalmente cerrada (o hasta sellada) para proteger tanto los conectores como las fundas y el aislamiento del cable frente a factores ambientales agresivos, como el polvo, el humo o las sustancias contaminantes.
En los robots de seis ejes, los ingenieros disponen de muchas soluciones para el trazado y la protección de los cables. Vamos a analizar tres soluciones muy conocidas: los tubos flexibles, los paquetes de protección cerrados y los sistemas de cadenas portacables robóticas.
Tubos flexibles
El tubo corrugado o flexible suele estar fabricado con poliuretano (PU) o poliamida y tiene un nivel excelente de resistencia a la ruptura en los puntos de conexión y una vida útil muy larga (imagen 3). Como inconvenientes, ofrece resistencia al movimiento del cable y solo se puede sujetar en los extremos; además, como es elástico, somete al cable interno a un esfuerzo adicional de estiramiento y torsión.

Imagen 3. un alojamiento para el cable trenzado es un método básico para proteger el cableado sin sacrificar la flexibilidad, y se puede emplear con distintos tipos de cable (fuente: Chepko Danil/stock.adobe.com).
Paquetes de protección cerrados
Al alojar los cables en una especie de «vestido» o paquete de protección, podemos conectarlos directamente al robot (imagen 4) con tubos de plástico corrugado para alojar los cables en su interior. Aquí también hay una desventaja: el mantenimiento de los cables será difícil, ya que están en un alojamiento completamente cerrado y no modular. Por lo tanto, en los diseños modulares, será necesario sustituir todo el conjunto aunque tan solo se averíe un componente.
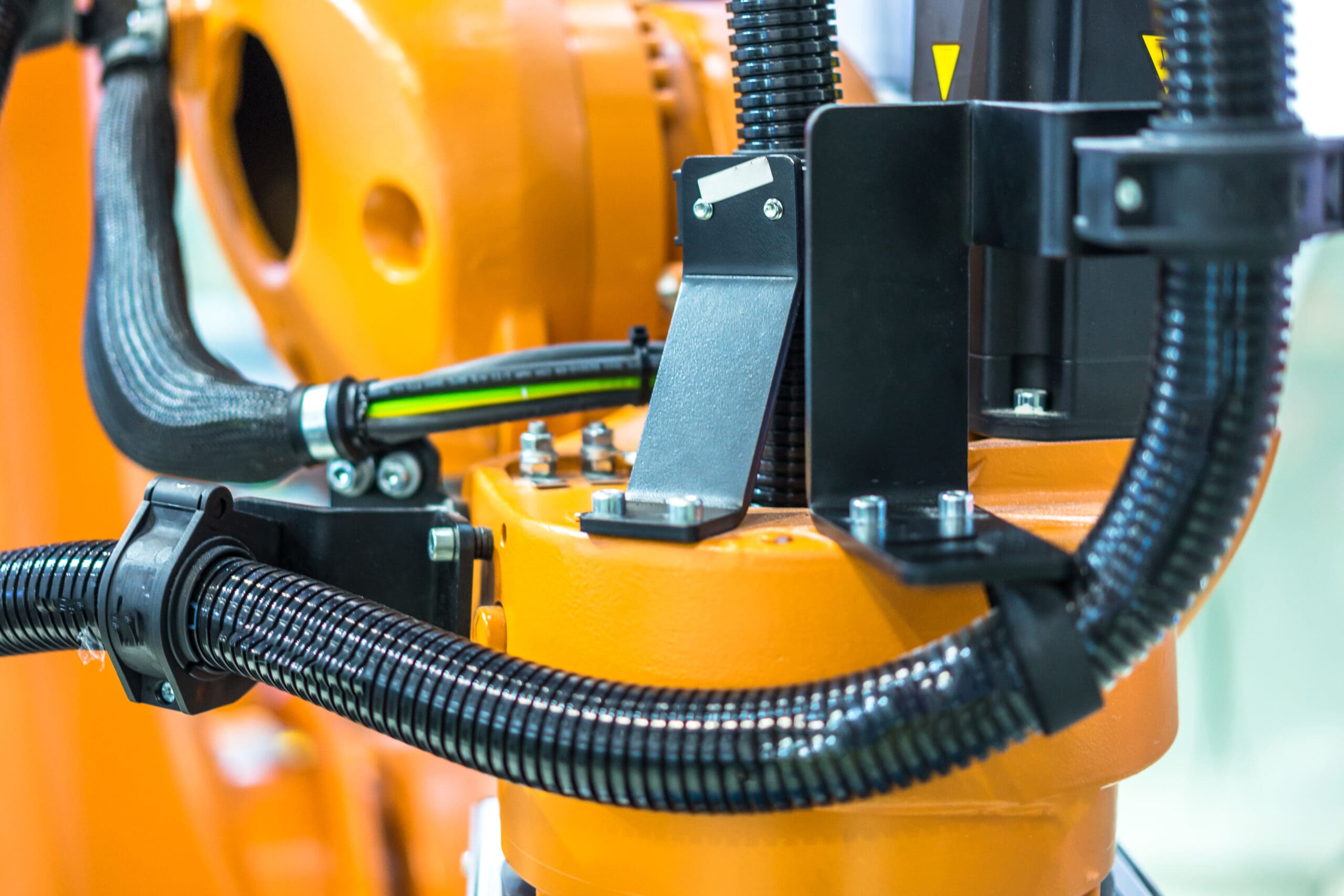
Imagen 4. el paquete de protección de cables es un método más avanzado y emplea tubos de plástico corrugado como alojamiento adicional (fuente: THINK b/stock.adobe.com).
Sistemas portacables
Es mejor emplear una solución en la que sea posible sustituir los componentes de manera individual, y los sistemas portacables aportan precisamente eso, ya que están compuestos por eslabones modulares de rótula. Otra ventaja importante de esta solución es que garantiza el respeto al límite del radio de curvatura mínimo. Además, si el sistema portacables es demasiado corto o largo, o si el robot se va a reubicar, es muy fácil añadir o quitar eslabones (imagen 5).
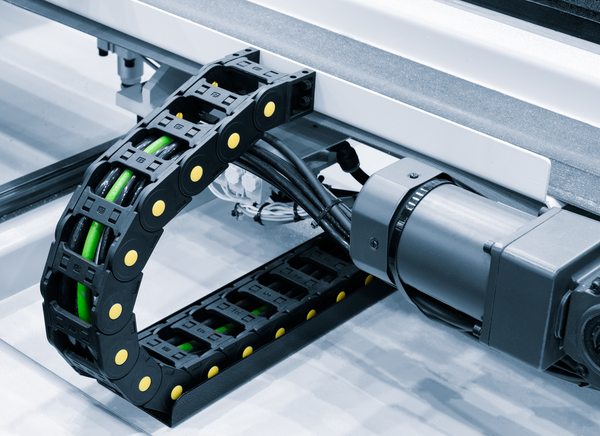
Imagen 5. el sistema portacables es más complejo que las opciones anteriores, pero añade protección y aporta otras características y ventajas, como las reparaciones individualizadas (fuente: Aleksandr Matveev/stock.adobe.com).
El trazado en el manejo de los cables
El trazado y la sujeción del cable también son aspectos importantes. A fin de cuentas, si los famosos de Hollywood tienen estilistas, los robots humanoides multieje también deberían tener sistemas para que funcionen bien y tengan un aspecto cuidado. Lo último que queremos que pase en un robot de alto rendimiento instalado en un entorno exigente es que haya un problema de alojamiento y acomodo de los cables.
Un gran número de instaladores y técnicos intentan minimizar la posibilidad de que los cables se enreden o estorben añadiendo portacables, bridas o cinta adhesiva, lo que tiene cierto sentido, pero esas medidas pueden acabar siendo contraproducentes. El motivo es que pueden acabar generando tirabuzones que provoquen una avería en el sistema.
La estrategia «divide y vencerás» es mucho mejor a la hora de manejar el cableado; es decir, dividir el robot en sus tres secciones principales, cada una con una ubicación y un número de ejes: del sexto al tercer eje, del tercer al segundo eje y del segundo al primero (imagen 6).
Los distribuidores de productos para la gestión del cableado disponen de directrices basadas en la experiencia y en procedimientos recomendados para gestionar y sujetar el cableado, así como para aliviar la tensión que sufre, en cada una de estas secciones. Además, también existen productos patentados y estándar del sector para implementar estas ideas en la gestión de los cables.

Imagen 6. al analizar detenidamente el cableado de un robot en las unidades de seis ejes, queda claro que los cables deben gestionarse de manera independiente en cada sección (fuente: Four888/stock.adobe.com; generada con IA).
Conclusión
Aunque el cableado y su instalación pueden parecer conceptos aburridos y rutinarios, en realidad, no lo son; sobre todo, cuando hablamos de sistemas robóticos y, especialmente, en los sistemas multieje. Hay factores que debemos tener en cuenta sobre los cables, el blindaje, el aislamiento y la instalación. Los proveedores de cables y productos de gestión del cableado para la robótica ofrecen soluciones específicas personalizadas para estas instalaciones, lo que resulta de gran ayuda para que los ingenieros se ahorren errores innecesarios que pueden acabar siendo muy caros.
Mouser Electronics asistirá al evento Advanced Factories 2026 en Barcelona (del 5 al 7 de mayo), donde se podrán ver tecnologías de automatización industrial (pabellón 2, estand F728).
Fuentes
https://www.robot-store.co.uk/six-axis-robots
https://www.roboticstomorrow.com/article/2014/02/the-less-is-more-approach-to-robotic-cable-management/236
https://www.igus.com/robot-dress-pack/robot-cable-management-solutions


