Los vehículos autónomos ven el mundo a través de sensores. La fiabilidad de estos dispositivos es la base de todo el concepto. Con todo, el hecho de que un sensor de radar ofrezca el rendimiento especificado depende en gran medida de su situación de montaje. Un nuevo equipo de pruebas proporciona ahora toda la información necesaria.
Los sistemas de asistencia avanzados que brindan ayuda al conductor y contribuyen a mejorar la seguridad vial se encuentran ya disponibles en los vehículos de gama inferior, y forman parte de la conducción diaria. Sin embargo, los vehículos (experimentales) totalmente autónomos acostumbran a ser noticia en los medios de comunicación, sobre todo cuando algún incidente viene a demostrar que estos complejos sistemas distan aún de estar preparados para su producción en serie. Pese a todo, lo que nadie pone en duda es que van a ser una realidad en un futuro próximo.
Sin sensores fiables no es posible la conducción autónoma
Entre los componentes clave de los vehículos autónomos se encuentran los sensores encargados de detectar el entorno. Aquí destacan, además de cámaras y sensores lídar, sobre todo los sensores de radar. Los radares para automóviles se fabrican ya a gran escala y forman parte del equipamiento de serie de los vehículos de gama alta. Actualmente su función principal es mejorar el confort de conducción y prevenir accidentes. La mayoría de sensores de radar para la regulación adaptativa de la distancia y la velocidad utilizan el rango de frecuencias comprendido entre 76 GHz y 77 GHz, es decir, un ancho de banda de 1 GHz, para detectar otros vehículos y objetos distantes. Otras funciones, en particular aquellas que exploran el entorno más cercano, como el asistente de cambio de carril o el sistema de supervisión de ángulos muertos, requieren no obstante anchos de banda superiores a fin de alcanzar una mayor resolución de distancia. Utilizan para ello el rango de entre 77 GHz y 81 GHz. Por su parte, la banda de frecuencias ampliada hasta 81 GHz contribuye a evitar interferencias radioeléctricas. Los radares de automóviles se protegen – más por razones estéticas que funcionales – con una cubierta denominada «radomo» (radar dome), que debe ser de un material transparente a las ondas de radiofrecuencia. Para ocultar los radares, se utiliza normalmente el emblema de la marca situado en la rejilla del radiador, aunque también pueden emplearse los parachoques de plástico.
Los emblemas servían en el pasado sobre todo para reforzar la imagen de marca, y no tenían ninguna otra función más allá de esa. Pero ahora, con su nueva utilidad como radomos, estos elementos adquieren el carácter de componentes técnicos de RF. Si su diseño no tiene en cuenta esta nueva realidad, tanto la capacidad de detección como la precisión de los radares que se ocultan tras ellos podrían verse seriamente perjudicadas. La forma tridimensional de los emblemas fabricados con materiales de espesor variable es un factor particularmente problemático en lo que respecta al rendimiento de RF necesario para el funcionamiento en el rango de las ondas milimétricas. Los parachoques, por su parte, suelen estar recubiertos con una pintura metálica que es igualmente perjudicial para las altas frecuencias. De ello se deduce que, para garantizar la fiabilidad de un radar, es esencial validar las propiedades de los materiales con los que están hechos los radomos así como investigar su influencia en las señales de radar. La conducción autónoma no admite riesgos ni incertidumbres por parte de los sensores del vehículo, ya que cualquier error que aquí se produzca apenas podrá ser corregido por el procesamiento posterior. En consecuencia, los fabricantes de automóviles y sus proveedores están obligados a hallar nuevos procedimientos de medición que les permitan evaluar la compatibilidad entre radomos y radares.
Los radomos pueden mermar considerablemente el rendimiento de los radares
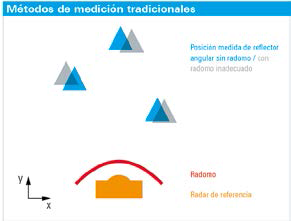
Los sensores de radar para automóviles utilizan principalmente señales de onda continua moduladas en frecuencia (FMCW). Mediante el retardo de propagación y el desplazamiento Doppler de frecuencia, el sensor puede medir y discriminar la distancia y la velocidad radial de varios objetos, así como el azimut e incluso la elevación, en función de las características de la agrupación de antenas. Tras la detección y el seguimiento, el sistema electrónico del sensor genera – como parte del procesamiento de la señal – una lista que contiene los datos de posición y movimiento de los objetos junto con información de tipos (peatón, automóvil, etc.). Esta lista se transmite a la unidad de mando del vehículo, donde se deciden en tiempo real las maniobras que realizará el vehículo. La precisión y fiabilidad de estos datos es de vital importancia para la seguridad del vehículo y los pasajeros. La precisión de un radar depende de numerosos factores: de los componentes de hardware, del procesamiento de software y del eco propio del radar. Los parámetros de ecos de señal con una baja relación señal/ruido (SNR) se pueden medir con menor precisión que los que poseen un valor SNR elevado. Además, efectos como la propagación por trayectos múltiples y la distorsión causada por los radomos influyen considerablemente en la precisión de las mediciones. Las imprecisiones en la medición del azimut tienen como consecuencia que el objeto aparezca desplazado con respecto a su posición real. La figura 1 ilustra claramente esta situación.
Un error de tan solo 1° en la medición del azimut por parte del sensor de radar se traduce en un desplazamiento lateral de 1,75 m cuando el objeto detectado se encuentra una distancia de 100 metros. Esta desviación podría provocar que la posición del objeto fuera detectada en otro carril de la carretera. Para garantizar un funcionamiento fiable del sistema, el error en la medición del ángulo a tales distancias debe ser muy inferior a 1°.
Inspección de problemas con un radar de automóvil estándar
La figura 2 muestra el efecto del desplazamiento del ángulo de azimut a partir de una serie de mediciones realizadas con componentes reales de la industria automovilística. Para ello se utilizó un radar de automóvil convencional y un objeto estático situado a 12,4 m de distancia del radar y en un ángulo de 11,5°. El gráfico muestra los efectos de diferentes radomos en la sección equivalente de radar y el ángulo de incidencia. Los valores sin radomo,
representados en azul, sirven como valores de referencia. Como se puede observar, el uso de un radomo adecuado (rojo) no tiene efecto alguno en el cálculo del ángulo de incidencia. Sin embargo, la sección equivalente de radar ha experimentado un descenso equivalente al valor de la pérdida bidireccional (en este caso, unos 2 dB). Al usar un radomo inadecuado (valores en naranja), la sección equivalente de radar desciende unos 4 dB con respecto a la medición de referencia, lo cual puede tener como consecuencia la imposibilidad de detectar objetos poco reflectantes. El efecto de utilizar un radomo inadecuado se observa también en la detección del ángulo de incidencia. Según indica el gráfico, ahora este valor ya no es constante a 11,5°, sino que muestra un comportamiento alternante a 11,7°, de modo que el sistema de evaluación electrónica no recibe un valor inequívoco. Con este radomo no se puede alcanzar la precisión deseada de 0,1° para radares de automóvil.

No basta solo con calibrar el radar
En un sensor de radar moderno con agrupación de antenas en la parte frontal del receptor, el azimut (y a veces también la elevación) se calcula midiendo las relaciones de fase y amplitud que se obtienen mediante conformación de haces con el conjunto fásico de antenas. Para lograr una precisión de medición óptima del ángulo de azimut, es necesario ajustar individualmente cada sensor de radar. A continuación se describe un procedimiento habitual para la calibración de radares. En primer lugar, se monta el sensor en un disco giratorio dentro de una cámara anecoica. Como objeto de referencia se suele utilizar un reflector angular en el campo lejano con una distancia conocida. Después se mide el patrón del radar y se guarda en la memoria del sensor. Esta información es utilizada posteriormente por el algoritmo de reconocimiento. La corrección se lleva a cabo durante el funcionamiento, es decir, se calcula durante el procesamiento de la señal. El fabricante del vehículo integra los sensores de radar calibrados, normalmente detrás de un emblema o del parachoques.

El material del que está hecho el radomo provoca una pérdida de transmisión que debilita la señal de radiofrecuencia por partida doble, ya que esta debe atravesar el material dos veces: en su recorrido hacia el objeto y en su recorrido de vuelta. Esto reduce el área de detección del radar, según se describe a continuación. El nivel de potencia de la señal emitida disminuye inversamente al cuadrado de la distancia r en cada tramo de acuerdo con las leyes de propagación de las ondas, lo que equivale a un factor de 1/r4 si se suman los recorridos de ida y de retorno. En un radar de 77 GHz con una potencia de salida de 3 W, una ganancia de antena de 25 dBi, un objeto con una sección equivalente de radar de 10 m² y una señal mínima detectable de −90 dBm, se obtendría para esta configuración un alcance máximo del radar de 109,4 m de acuerdo con la ecuación de la distancia. Si el radomo genera una pérdida bidireccional de 3 dB, el alcance de dicho radar se reducirá en un 16 %, hasta un valor de tan solo 92,1 m. Pero la atenuación provocada por el material no es el único factor que incide en la potencia del radar. La reflectividad y la homogeneidad del material del radomo tienen también un papel importante. Las reflexiones que se producen, por ejemplo, en partículas metálicas de la pintura, y la desadaptación de RF del material base provocan señales interferentes en el propio radomo, es decir, en las inmediaciones del sensor. Estas señales se reciben y se realiza una conversión descendente en la cadena del receptor, proceso que reduce la sensibilidad de detección del radar.
Muchos fabricantes de automóviles intentan suprimir este efecto instalando los radomos en posición inclinada para que la señal emitida por el radar se refleje con una cierta desviación y no incida directamente en la vía de recepción. Esta solución está sujeta, lógicamente, a restricciones de diseño, y no elimina la causa de la pérdida de energía de RF debida a reflexiones parásitas. Otro problema es la falta de homogeneidad del material debido a inclusiones y variaciones de densidad que afectan el frente de onda en ambas direcciones. Dado que este se ve distorsionado, las mediciones del ángulo muestran una menor precisión. La calibración del sensor de radar no puede contrarrestar este efecto, ya que el radar calibrado puede estar montado debajo de radomos de distintos fabricantes.
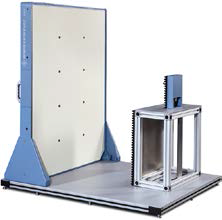
monta en el borde delantero de la mesa. El accesorio azul contiene el emisor de ondas milimétricas
opcional para mediciones de transmisión.
Así se prueban los radomos en la actualidad
Los fabricantes de radomos utilizan habitualmente un radar de referencia para probar sus productos. Este tipo de pruebas requiere la instalación de reflectores angulares delante del radar a una distancia y con una posición de azimut predeterminadas (fig. 3). A continuación, se determinan las diferencias con y sin radomo y se comparan entre sí. Se considera que el radomo ha superado la prueba cuando los datos de distancia o posición de azimut calculados por el radar, así como el nivel de señal de eco, se encuentran dentro de los límites prescritos. Sin embargo, dado que con este procedimiento tan solo se comprueban ciertos ángulos acimutales, es fácil pasar por alto los puntos problemáticos del radomo. Existe otro método de medición que funciona de manera similar pero con un solo reflector. En este caso, se montan el sensor de radar y el radomo en un disco giratorio y se repite la medición con diferentes posiciones angulares. El ángulo real (ground truth) que se puede leer en el disco se compara con el ángulo medido por el radar. La exactitud de este método depende directamente de la precisión de posicionamiento del disco giratorio. Sin embargo, la prueba dura mucho tiempo, por lo que no resulta recomendable para pruebas de producción.
Pruebas concluyentes con solo presionar un botón: sistema para pruebas de radomos R&S®QAR
El R&S®QAR evalúa la calidad de radomos para automóviles (fig. 4), superando las limitaciones de los métodos tradicionales. En lugar de un radar de referencia con su diminuto campo de antenas, utiliza un panel de grandes dimensiones poblado de centenares de antenas de emisión y recepción, las cuales operan en el rango de frecuencias ampliado de los radares de automóvil entre 75 GHz y 82 GHz. Por tanto, el sistema «ve» lo mismo que vería un radar de automóvil que dispusiera también de centenares de antenas,
por encima de la superficie del radomo. Este pequeño incremento del grosor es suficiente
para provocar una desadaptación en la banda de 77 GHz (fig. 6).
pero, gracias su gran abertura, mide distancia, azimut y elevación con una resolución mucho mayor (en el rango milimétrico). Gracias a esta finura de detalles, el resultado de medición (más concretamente: la reflectividad) se visualiza como una imagen similar a una radiografía, lo que facilita una rápida evaluación de la calidad incluso a usuarios no expertos en prueba y medición. Contrariamente a lo que sucede en las mediciones con radares reales, no es necesario realizar varias series largas de pruebas para determinar las propiedades del radomo; el R&S®QAR obtiene todos sus resultados en una sola toma, al estilo de una cámara fotográfica.
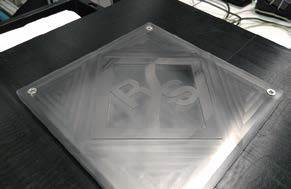
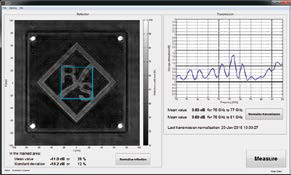
El radomo examinado se coloca en una área definida delante del panel. A continuación pueden realizarse dos mediciones: una para la reflectividad y otra para la transmisividad del objeto sometido a ensayo. Primero se mide la reflectividad a fin de determinar la cantidad de energía reflejada por el material del radomo. Esta energía no pasa a través del radomo y, en consecuencia, contribuye a empeorar el rendimiento o incluso, como se mencionó anteriormente, a perjudicar el correcto funcionamiento. El hecho de que un área posea una alta reflectividad depende de varios factores, como por ejemplo la presencia de defectos en el material, inclusiones de aire, interacciones no deseadas entre diferentes capas de material o una cantidad excesiva de ciertos componentes en los materiales. El método de medición proporciona resultados con resolución espacial a través de la asociación coherente (en cuanto a magnitud y fase) de todas las señales reflejadas. La visualización de los resultados permite una evaluación espontánea de la calidad del objeto medido, además de análisis cuantitativos. A modo de demostración, se fabricó un radomo de prueba en el que sobresalía el rombo de Rohde & Schwarz, de forma que se generaran espesores de capa variables (fig. 5). La imagen de radar en alta resolución (fig. 6) ilustra lo que vería un sensor de radar oculto bajo este radomo. Los diferentes niveles de brillo codifican la reflectividad. Cuanto más brillante sea una zona, más ondas de radar reflejará. El metal se muestra de color blanco (los tornillos en las cuatro esquinas).
Los contornos claramente visibles del logotipo son indicativos de una zona con alto grado de reflectividad y una imagen general muy poco homogénea. El mayor espesor de 0,5 mm en la zona del logotipo bastaría para mermar considerablemente el rendimiento del radar en la circulación vial. En el centro del radomo, donde suele ir colocado el sensor, se calcula para este caso una reflectividad
diseño tridimensional complejo.
media de −11,0 dB con una desviación estándar de −18,2 dB. En muchos escenarios de aplicación este valor sería demasiado alto para poder garantizar un funcionamiento fiable del radar. En la práctica, la reflectividad esperada depende de la sensibilidad de la unidad de radar y de la distancia máxima que se ha de cubrir. En segundo lugar se miden la adaptación de frecuencia y la atenuación generada por el material del radomo. Para ello se utiliza un módulo emisor colocado detrás del objeto sometido a ensayo (fig. 4). El emisor barre un rango de frecuencias seleccionado. Esto permite evaluar de forma exacta la respuesta en frecuencia de transmisión del radomo. La respuesta en frecuencia proporciona información detallada sobre la adaptación de RF del objeto sometido a ensayo en la banda de frecuencias prevista para el funcionamiento del radar.
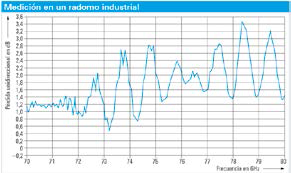
Esta información es independiente de la forma de onda de señal utilizada específicamente por la unidad de radar, y por tanto, es válida para todos los tipos de radar que pueden instalarse detrás del radomo. En la parte derecha de la figura 6 se muestra esta medición para el radomo del ejemplo. Debido al alto valor de rizado entre 76 GHz y 79 GHz, un radomo de este tipo no resultaría adecuado para radares que operen en este rango de frecuencias. La medición de la transmisión en un radomo tridimensional real de la industria automovilística dio como resultado una curva igual de irregular (fig. 7). Este radomo causaría distintos problemas de rendimiento: La adaptación de frecuencia se encuentra en aproximadamente 71 GHz (en lugar de 76 GHz), una situación nada favorable. Esto se debe generalmente al mayor espesor en ciertas capas del radomo. Las variaciones erráticas de atenuación en la banda de 79 GHz implican un considerable aumento de la relación de onda estacionaria. Ello indica la existencia de reflexiones en los límites del radomo así como fuertes efectos de interferencia. La pérdida unidireccional total es relativamente alta, lo que podría originar una reducción notable del área de detección.
Resumen
La conducción autónoma exige radares que sean fiables, es decir, que detecten objetos del entorno sin errores. Su éxito no solo depende de la calidad de los radares utilizados, sino también de su montaje. Las piezas de la carrocería bajo las cuales van montados los radares (radomos) – normalmente, el emblema de la marca y los parachoques – pueden perjudicar las señales hasta el punto de impedir al radar detectar los objetos o impedir localizarlos en su posición correcta. Hoy en día estas piezas no solo deben desempeñar su función original, sino que además deben tener propiedades definidas de RF. Por ello, es imprescindible recurrir a métodos de medición precisos y prácticos para su evaluación. El R&S®QAR permite evaluar la calidad de radomos de automóvil de una forma más rápida y eficiente que con radares de referencia. Mide la transmisividad de RF del objeto medido – que revela la idoneidad de un diseño de radomo –, así como su reflectividad, la cual se visualiza como imagen radiográfica para permitir incluso a los menos expertos una evaluación fiable “pasa/no pasa” especialmente en ensayos de final de línea.





