
A medida que los vehículos evolucionan desde máquinas básicamente mecánicas hacia ecosistemas electrónicos, ha aumentado el número de motores necesarios para realizar las funciones a bordo. Los coches actuales dependen de motores eléctricos para una serie de componentes electrónicos de la carrocería, como las puertas correderas eléctricas y los abridores automáticos del maletero o la puerta trasera, así como para aplicaciones bajo el capó, como bombas de agua, bombas de aceite y ventiladores de refrigeración. Este cambio también ha supuesto la sustitución de los motores tradicionales con escobillas por motores CC sin escobillas (BLDC), que son los preferidos por su larga vida útil, su eficiencia y su funcionamiento silencioso. Sin embargo, esta transición introduce complejidad en el diseño de las unidades de control electrónico (ECU), que deben ser lo suficientemente robustas como para soportar los duras condiciones del entorno automovilístico, pero también lo suficientemente flexibles como para adaptarse a los requisitos cambiantes del sistema. El núcleo de este reto reside en la arquitectura de la ECU.
Trade-offs de la arquitectura de la ECU
Históricamente, los ingenieros han tenido que elegir entre soluciones altamente integradas y configuraciones de componentes discretos, cada una con sus propios trade-offs (Figura 1).
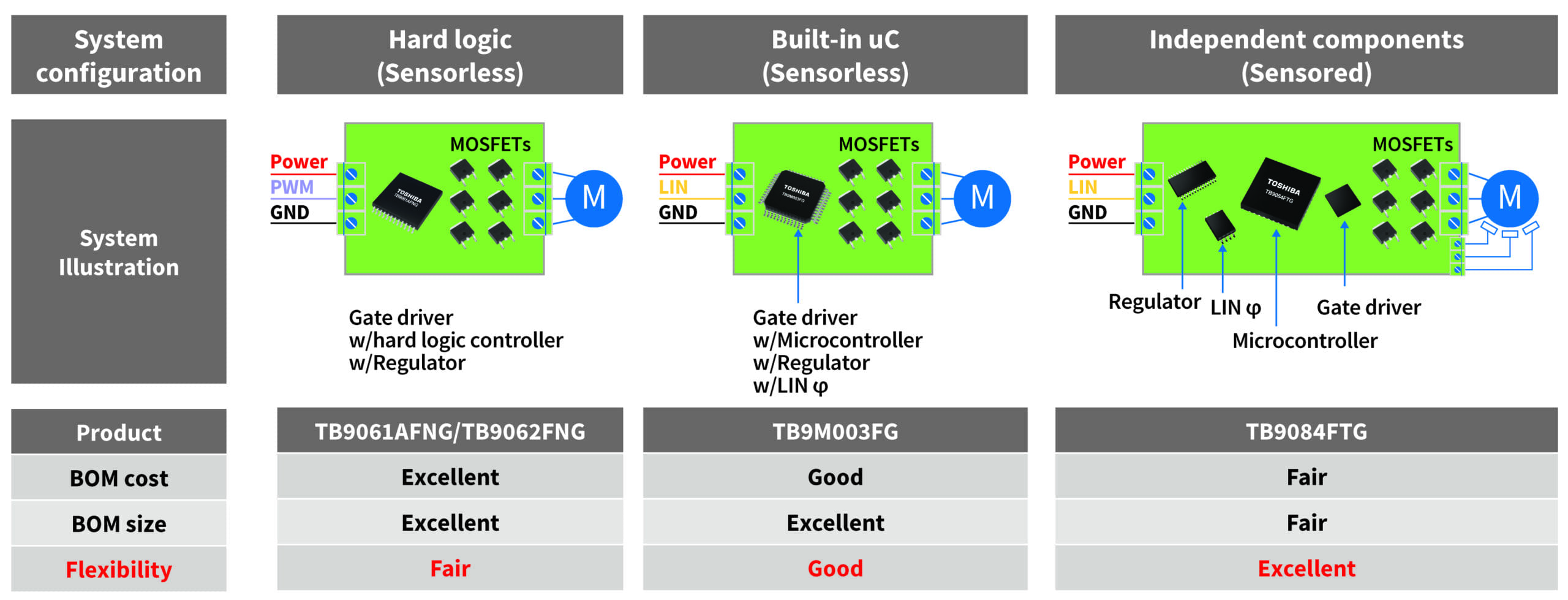
Figura 1. Tres tipos de configuraciones de ECU y sus ventajas/inconvenientes
Una configuración integrada, en la que el control del motor se gestiona mediante una lógica de hardware dedicada, ofrece ventajas en cuanto al tamaño total de los componentes y el coste. Sin embargo, este enfoque suele carecer de flexibilidad en el diseño. Si cambian los requisitos del sistema, por ejemplo, si un motor requiere una corriente de accionamiento más alta, es posible que sea necesario sustituir toda la solución, lo que podría obligar a rediseñar toda la ECU.
Otro enfoque consiste en utilizar un microcontrolador con periféricos de potencia integrados. En general, se considera que esta configuración ofrece el mejor equilibrio entre ventajas y desventajas. No obstante, el MCU tiene una capacidad de procesamiento limitada. Si los requisitos del sistema evolucionan hasta superar esta capacidad, los cambios de diseño necesarios suelen ser sustanciales.
El tercer enfoque consiste en utilizar una configuración discreta, en la que el MCU, el controlador de puerta, la fuente de alimentación y los MOSFET son componentes separados. En esta configuración, si aumentan los requisitos de potencia, solo es necesario actualizar los MOSFET, dejando intacta la arquitectura lógica y de control. Aunque esta configuración tiene desventajas en cuanto al tamaño y el coste total de los componentes, ofrece una flexibilidad superior.
Toshiba aborda estos retos arquitectónicos con el TB9084FTG, un circuito integrado controlador de puerta que salva la brecha entre los dispositivos con funciones mínimas y sus equivalentes altamente complejos y críticos para la seguridad. El dispositivo permite a los ingenieros de diseño de sistemas conservar la flexibilidad de diseño del enfoque discreto, al tiempo que se benefician de la reducción de tamaño que ofrece la integración.
Versatilidad gracias a conjuntos de funciones optimizados
Versatilidad gracias a conjuntos de funciones optimizados
La flexibilidad de diseño en los sistemas de automoción no suele conseguirse añadiendo funciones, sino optimizándolas para adaptarlas a una amplia gama de casos de uso . La filosofía de diseño de Toshiba para el TB9084FTG hace hincapié en la versatilidad, lo que lo distingue de productos relacionados como el TB9081FG, que cuenta con todas las funciones para la dirección asistida eléctrica (EPS) y es compatible con las normas de seguridad ASIL-D. Sin embargo, este enfoque minimalista no equivale a una falta de capacidad.
El dispositivo cuenta con un circuito de bomba de carga para garantizar un voltaje suficiente para accionar MOSFET de canal N externos, incluso cuando el voltaje de la batería fluctúa. Acciona los FET trifásicos necesarios para el motor e incluye un canal adicional para controlar un MOSFET para la protección contra polaridad inversa (RPP). Esta función RPP destaca la flexibilidad del sistema del dispositivo, ya que garantiza que, incluso si la batería se conecta incorrectamente, la corriente inversa se desconecta, protegiendo así el sistema en general.
Además, la bomba de carga garantiza que el controlador de puerta de alto voltaje mantenga un voltaje de salida estable, fijándose en niveles específicos cuando el voltaje de la batería es suficiente y pasando a través del voltaje de la bomba de carga cuando es bajo.
Configurabilidad a través de SPI
La verdadera flexibilidad en el diseño del sistema se consigue cuando el comportamiento del hardware puede modificarse mediante software. A diferencia de los controladores rígidos que solo funcionan con hardware, este CI incorpora un circuito de interfaz periférica serie (SPI) que actúa de puente entre el controlador y el MCU host. A través de SPI, el diseñador del sistema puede configurar dinámicamente cómo responde el controlador a diversas condiciones de funcionamiento, trasladando eficazmente las decisiones lógicas del silicio fijo a ajustes configurables por software.
Por ejemplo, el dispositivo cuenta con múltiples circuitos de detección de anomalías, que incluyen comprobaciones de sobretensión, subtensión y apagado térmico. A través de los registros SPI, el diseñador puede decidir si un fallo específico debe activar un modo de bloqueo, en el que el sistema se apaga hasta que se reinicia manualmente, o un modo de recuperación automática, en el que el funcionamiento se reanuda una vez que se soluciona el fallo.
Para la detección de sobretensión, el sistema puede programarse para desactivar completamente la detección, continuar funcionando mientras se señala el error o apagar los controladores de puerta. Del mismo modo, la reacción ante eventos de sobretemperatura puede personalizarse, lo que permite que el sistema se apague completamente o continúe funcionando mientras se emite una señal de advertencia, dependiendo de la criticidad de la aplicación.
Este comportamiento definido por software se extiende a la protección de los MOSFET externos. El circuito de detección de tensión entre drenaje y fuente supervisa la caída de tensión en los FET de lado alto y lado bajo para identificar cortocircuitos o fallos. Los diseñadores pueden utilizar la interfaz SPI para establecer tensiones umbral específicas y tiempos de enmascaramiento para esta detección, evitando falsas alarmas durante los transitorios de conmutación. Ajustando estos parámetros, se puede configurar un único CI controlador de puerta para que funcione con diferentes motores y MOSFET en diversas plataformas de vehículos.
Adaptabilidad física y fiabilidad
Las limitaciones de diseño físico de los vehículos modernos también requieren flexibilidad en el envolvente y durabilidad ambiental. Dado que las ECU se encuentran apiñadas en espacios cada vez más reducidos dentro de los paneles de las puertas o los compartimentos del motor, es esencial minimizar el espacio físico que ocupan. Alojado en un encapsulado compacto P-VQFN36 de 6 mm × 6 mm, el TB9084FTG contribuye a la reducción del tamaño de la ECU.
A pesar de su pequeño tamaño, el encapsulado está diseñado para ofrecer una alta fiabilidad, con una estructura de flanco humectable. Este elemento de diseño es fundamental para la fabricación de automóviles, ya que permite la inspección óptica automática (AOI) de las juntas soldadas y garantiza la integridad de la conexión sin necesidad de costosas inspecciones con rayos X.
Además, el dispositivo cuenta con la certificación AEC-Q100 Grado 0, lo que garantiza su funcionamiento en un rango de temperatura de unión desde -40 °C a 175 °C. Este amplio rango térmico ofrece a los ingenieros la flexibilidad de colocar la ECU en zonas de alta temperatura bajo el capó o en carcasas de motor integradas mecánicamente, en lugar de limitarse al entorno más fresco de la cabina.
Control y diagnóstico de precisión
Por último, la flexibilidad se ve respaldada por capacidades analógicas de precisión que permiten a la ECU supervisar con exactitud el rendimiento del motor. El TB9084FTG integra un amplificador de detección de corriente (CSA) para supervisar la corriente que fluye a través del motor. Este amplificador incluye una función de calibración que corrige la tensión de offset de entrada dentro de ±1 mV en condiciones estándar. La ganancia del amplificador se puede ajustar a través de SPI, lo que permite al sistema adaptarse a diferentes resistencias en derivación y rangos de corriente. Esto garantiza que el MCU reciba una retroalimentación precisa para los algoritmos de control del motor, ya sea para accionar un pequeño ventilador o una potente bomba.
La inclusión de registros de estado detallados permite al MCU diagnosticar fallos específicos, como distinguir entre errores de comunicación, eventos térmicos y anomalías de tensión. Esta profundidad de diagnóstico permite al software del sistema tomar decisiones inteligentes, como activar un reintento o alertar al conductor, lo que aumenta la resiliencia de la arquitectura general del vehículo.
Conclusión
En última instancia, la necesidad de flexibilidad en el diseño de sistemas para equipos de automoción viene impulsada por el deseo de reducir el tiempo y el coste de desarrollo, al tiempo que se maximiza la reutilización de los activos de ingeniería. Una solución rígida y altamente integrada puede resolver un problema específico de manera eficiente, pero se convierte en un lastre cuando las especificaciones evolucionan. Por el contrario, una solución flexible como el TB9084FTG permite a los ingenieros diseñar una plataforma ECU central que puede adaptarse a una amplia variedad de cargas y requisitos de seguridad funcional mediante la selección de componentes y la configuración del software.





