
Introducción a los osciloscopios Rigol
El diseño embebido y, en especial, el trabajo de diseño que utiliza señalización en serie de baja velocidad es una de las áreas de diseño de electrónica digital que más rápido está creciendo. La necesidad de comunicación entre módulos, FPGAs y procesadores dentro de una amplia gama de electrónica de consumo e industrial está aumentando a un ritmo asombroso. El uso de protocolos y buses de comunicación personalizados es fundamental para la eficiencia del diseño y el tiempo de comercialización, pero conlleva el riesgo de que a veces sea difícil de analizar y depurar. Las fuentes y tipos de problemas más comunes cuando se utilizan datos en serie de baja velocidad en una aplicación embebida incluyen la temporización, el ruido, la calidad de la señal y los datos. Recomendaremos consejos de depuración y características disponibles en osciloscopios modernos como el MSO5000 de Rigol, que harán que la depuración de estos complejos sistemas sea más rápida y sencilla.
Tipos de Errores en osciloscopios
Sincronización
La sincronización es crítica en cualquier sistema de datos en serie, pero encontrar las limitaciones de sincronización del sistema relacionadas con los componentes, la longitud de la transmisión, el tiempo de procesamiento y otras variables puede ser difícil. Empecemos con un simple circuito DAC de 8 bits. En primer lugar, asegúrate de que comprendes las especificaciones de datos y sincronización del protocolo en uso. ¿Muestra los datos justo en el límite (edge) del reloj? ¿Qué diferencia puede haber entre el reloj y los datos cuando todavía se esperan buenos datos? En otras palabras: ¿tenemos definido un umbral de error de sincronización del reloj? Una vez que comprendamos estos requisitos de sincronización, podremos verificar experimentalmente los subsistemas de hardware de transmisión y recepción. Ahora podemos analizar los retrasos de sincronización a nivel de sistema y la precisión global de las conversiones, ya que podemos realizar mediciones directas tanto de los canales lógicos como de los analógicos de forma correlacionada en el tiempo. También podremos ver simultáneamente los patrones de bits decodificados numéricamente en el osciloscopio MSO5000.
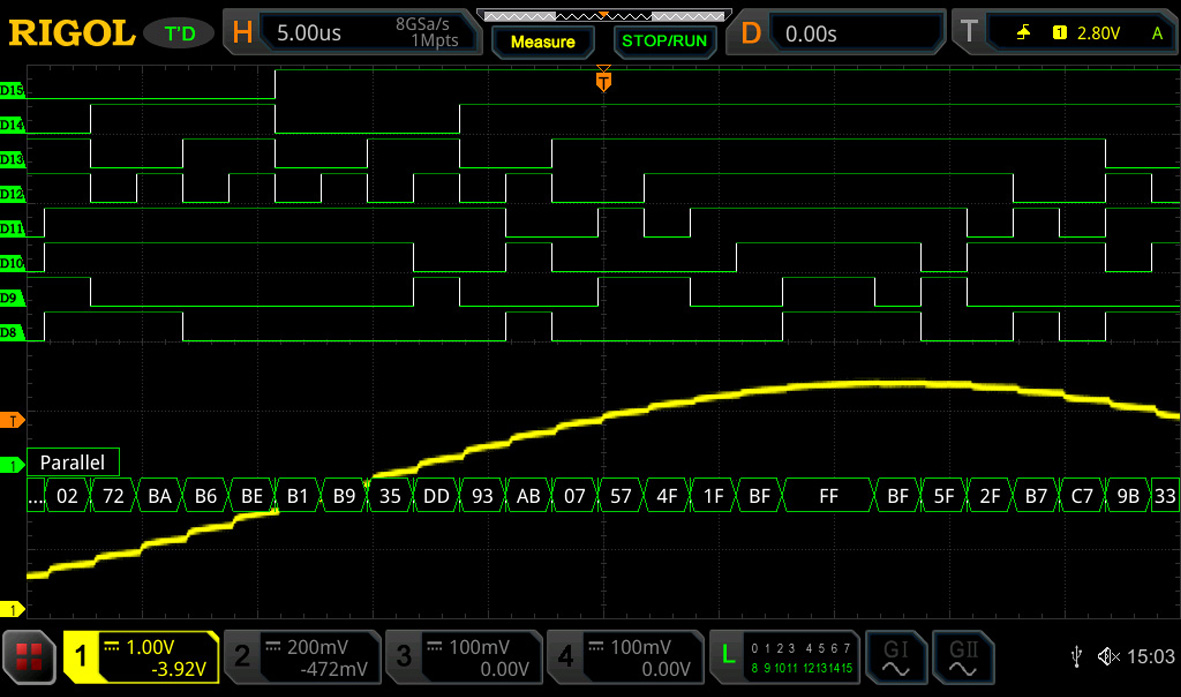
Este es un ejemplo sencillo de la medición de un bit (de 8) en el canal 2 (azul) que está conduciendo la entrada DAC que está creando la onda sinusoidal en el canal 1 (amarillo) en la salida DAC.

Utilizando la decodificación del bus paralelo (Figura 1) podemos echar un vistazo rápido a las transiciones de esta única línea. Pero esto no nos da toda la información que necesitamos ya que el DAC está utilizando un número de líneas de datos para establecer su nivel de salida. Obtener datos más completos requiere un enfoque diferente. Movamos todas las líneas del DAC (Figura 2) a las entradas digitales del MSO. Ahora podemos ver cómo las líneas digitales se coordinan realmente con la salida del DAC.
Para investigar más a fondo podemos simplificar la decodificación para mostrar los valores hexadecimales y hacer un zoom para poder ver los datos decodificados.
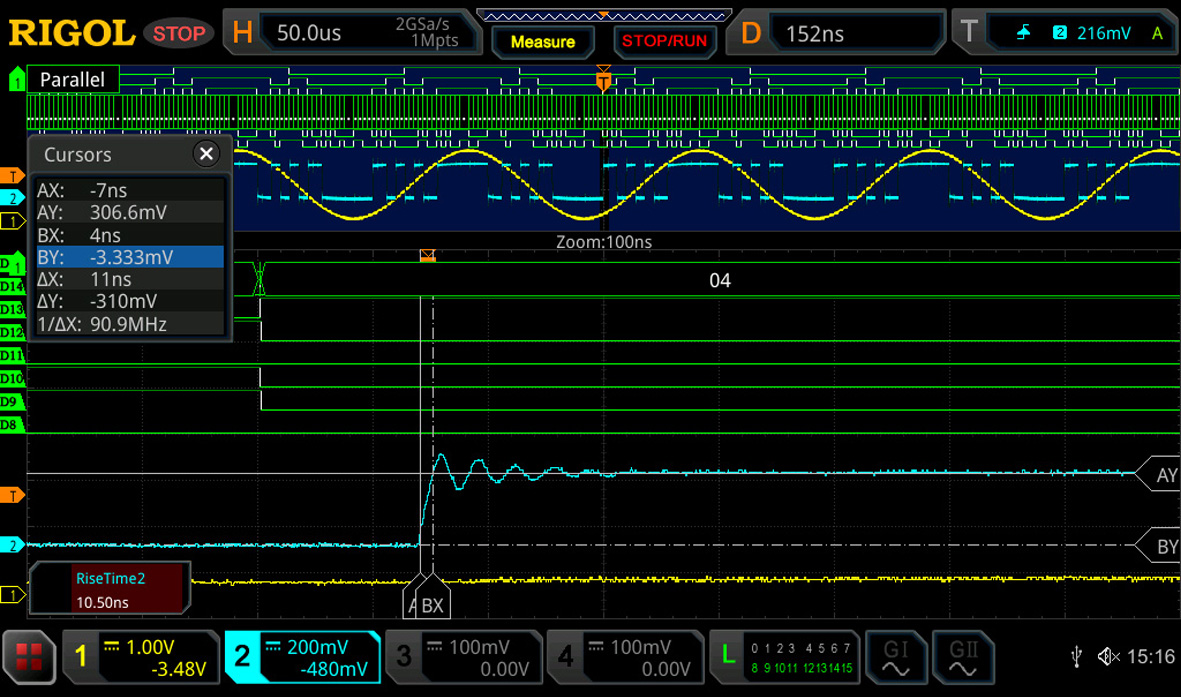
Ahora podemos utilizar el zoom para ver claramente la relación entre las transiciones de los bits y el DAC (Figura 3). Para el zoom hemos activado el canal analógico 2 (en azul) que está en el reloj del DAC. Aumentado por un factor 500x desde 50 msg por división hasta 100 nsg por división nos permite ver que las transiciones de los bits están ocurriendo 140 nsg antes de la transición del reloj. La transición del reloj se produce en menos de 5 nsg y la salida del DAC comienza a cambiar en sincronizada con el reloj. También podemos utilizar los cursores del osciloscopio para que el tiempo de las transiciones sea más claro y esté bien definido.
También podemos disparar sobre los patrones digitales en lugar de la señal analógica. Disparar sobre un patrón digital puede ser crítico para la depuración cuando hay un problema. No siempre hay una buena manera de seguir los eventos desde el lado analógico de un sistema. Cuando utilice un método de disparo digital, asegúrese de establecer los parámetros de disparo adicionales. Estos pueden incluir bits de inicio o incluso dirección y datos para algunos protocolos. Incluso para un simple bus paralelo como éste, es necesario definir y organizar los canales en el bus para que los resultados sean más fáciles de interpretar.
La sincronización precisa de las señales en serie de baja velocidad es fundamental para la estabilidad del sistema. Por lo tanto, asegurarse de que sus herramientas de medida están a la altura de la tarea de disparar, supervisar y analizar de forma precisa y sencilla sus formas de onda, es vital para mejorar la eficiencia de I+D y, en última instancia, el tiempo de comercialización.
Ruido
Uno de los problemas más comunes en las mediciones correctas de datos en serie es la gestión del ruido del sistema. El ruido en estas mediciones puede proceder de varias fuentes, como una mala conexión a tierra, problemas de ancho de banda, diafonía (crosstalk) o problemas de inmunidad electromagnética (EMI). A veces el problema está en el dispositivo, pero la mejora de las técnicas de sondeo y medida también puede mejorar los resultados de forma significativa sin necesidad de cambiar el dispositivo en prueba. Un buen primer paso es siempre asegurarse de que estamos utilizando las mejores prácticas de medida.
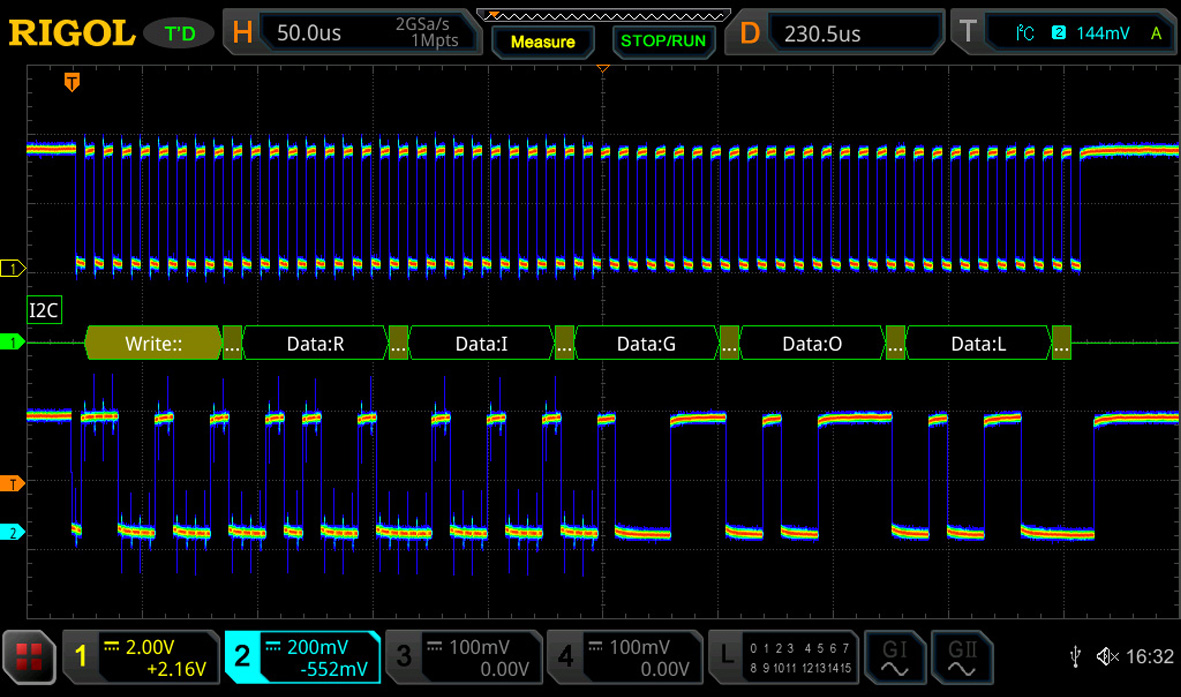
A continuación, se muestra un segmento de bus I2C decodificado utilizando un osciloscopio de la serie 5000 (Figura 4). En el primer ejemplo tenemos una conexión a tierra extremadamente pobre en nuestras sondas. Debido a que la toma a tierra del osciloscopio está unida directamente a la toma de tierra de alimentación, las señales que necesitan flotar o simplemente utilizar un plano de tierra diferente o ruidoso pueden causar resultados como este. También es posible que el alto consumo de corriente a través de la toma de tierra en la alimentación local cree bucles de tierra que pueden causar la introducción de ruido en su sistema.
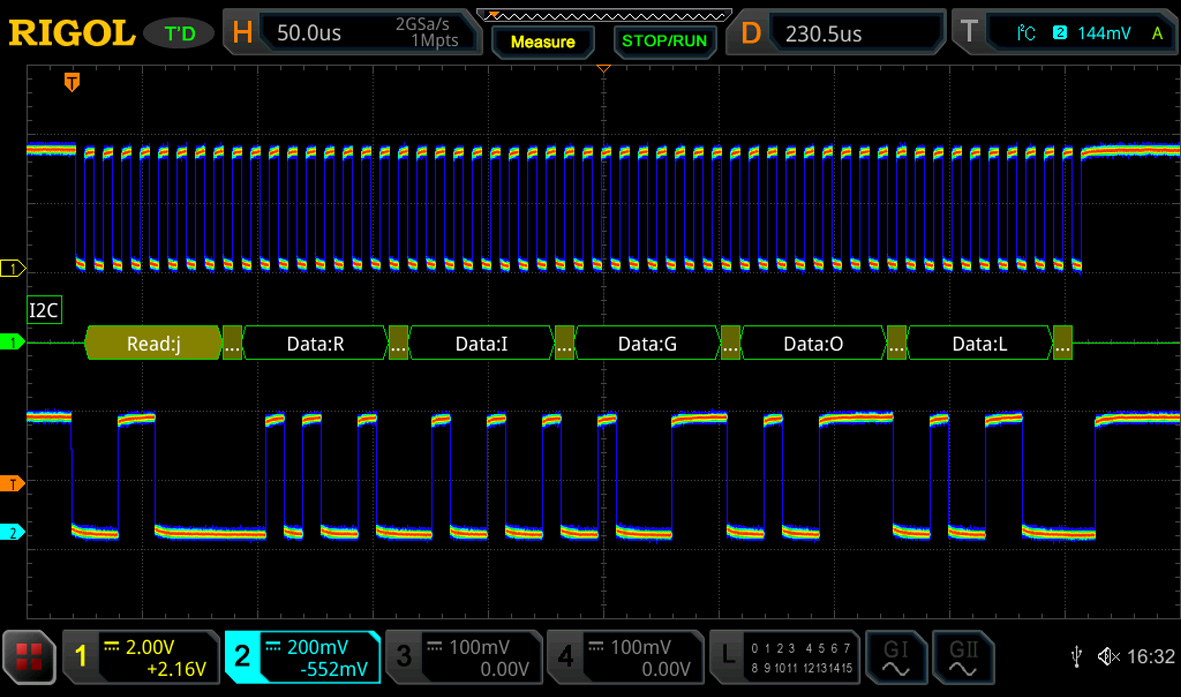
Resolvemos estos problemas en orden de fácil a difícil. En primer lugar, podemos ver las conexiones de nuestras sondas. Normalmente, usaríamos la correa de tierra con pinza de cocodrilo que se conecta en la sonda para hacer una conexión a tierra. Suponiendo que lo hagamos correctamente y sigamos teniendo problemas, es posible que tengamos que utilizar el muelle de tierra en su lugar. El muelle de tierra se conecta más cerca de la punta de la sonda y reduce significativamente el área de bucle de la conexión. Esto puede mejorar significativamente el ruido y la calidad de la señal (Figura 5) especialmente para señales de alta velocidad o señales sensibles a la capacitancia o a los voltajes acoplados. Todas las sondas RIGOL vienen con la correa de tierra estándar y el muelle de tierra para este tipo de mediciones.
Si el ruido de tierra sigue siendo un problema, intente aislar su dispositivo de la tierra. El osciloscopio funciona mejor conectado a la tierra de la alimentación de CA a través del enchufe. Si el resto del dispositivo o sistema que se está probando puede aislarse de la tierra, esto elimina los bucles de tierra. Si el ruido de tierra sigue siendo un problema, puede considerar una sonda diferencial como la RP1100D de Rigol, que permite realizar mediciones sin referencia a tierra en el osciloscopio. Las mediciones diferenciales pueden ser la única manera de ver claramente algunos datos en serie de baja velocidad, como un bus LVDS (señalización diferencial de bajo voltaje). Los buses como éste mueven a propósito la línea de referencia para maximizar el ancho de banda y aumentar las distancias de comunicación, pero pueden necesitar de un verdadero sondeo diferencial o el uso de múltiples canales de su osciloscopio juntos para ver la señal correctamente.
Ahora que hemos mejorado nuestra relación señal/ruido disminuyendo el ruido añadido desde tierra, podemos dirigir nuestra atención al filtrado del ancho de banda. El ruido de alta frecuencia también puede entrar en sus mediciones a través de la diafonía de canal a canal u otras fuentes de alta frecuencia cercanas o dentro de su dispositivo. Una forma de solucionar esto es utilizar los límites de ancho de banda de cada canal. Cada canal del osciloscopio RIGOL puede limitar el ancho de banda del ADC. Un límite de 20 MHz es bastante estándar. Además, hay algunos ajustes de modo de adquisición y disparo que pueden mejorar el rendimiento frente al ruido. Muchos tipos de disparo tienen un elemento de menú que permite activar el rechazo del ruido para el esquema de disparo. La serie 5000 incluye incluso HFR y LFR (rechazo de altas y bajas frecuencias) como opciones en la forma de acoplar la señal disparada. La serie MSO5000 viene con el modo High Res o Alta Resolución. Esta función utiliza un sobremuestreo adicional que se realiza entre bastidores en muchas mediciones para proporcionar un promedio que da lugar a menos ruido. Esto promediará en lugar de rechazar las señales de alta frecuencia, así que asegúrese de entender sus posibles fuentes de error y cómo pueden interactuar con su configuración de medición. Por último, el osciloscopio de la serie 5000 también tiene una función NRJ (Noise Rejection – rechazo de ruido) directamente en el menú de disparo. Esta función elimina el ruido que aparece en ráfagas y puede ajustarse en tiempo en lugar de en frecuencia. Para aislar y localizar aún más las fuentes de ruido dentro de su sistema, es posible que desee centrarse en los problemas relacionados con la EMC o la EMI.
El ruido es siempre una preocupación cuando se trabaja con señales en serie de baja velocidad. Por definición, estas señales siguen yendo a velocidades más altas, codificación más avanzada, distancias de transmisión más largas y niveles de voltaje y potencia más bajos. Todas estas tendencias hacen que el hardware sea más susceptible al ruido. La realización de mediciones cuidadosas que limiten o eliminen la incorporación de ruido a nuestro sistema, nos permite centrarnos en el ruido del sistema que aún puede causar problemas de diseño a largo plazo.
Calidad de la Señal en los osciloscopios
Monitorizar y mejorar la calidad de las señales en serie de baja velocidad es otra parte crítica del proceso de depuración. Cuestiones como los desajustes de impedancia, el ancho de banda y los errores de carga pueden afectar a la calidad de las señales incluso cuando no hay ruido. Ahora que estamos viendo más de cerca la naturaleza exacta de estas señales es importante verificar la forma en que estamos utilizando nuestro osciloscopio para estas pruebas. Para las pruebas de calidad de la señal utilizaremos los canales analógicos porque proporcionan la mejor visión de lo que realmente está ocurriendo con nuestras señales. Esto requiere una previsión adicional. Para ver claramente las transiciones de datos, debemos utilizar una frecuencia de muestreo lo más alta posible. El muestreo a 5 veces la tasa de bits del bus digital debería considerarse el mínimo debido a los componentes de alta frecuencia que necesitamos visualizar. El muestreo a 10 veces la tasa de bits debería permitirnos ver cualquiera de los problemas.
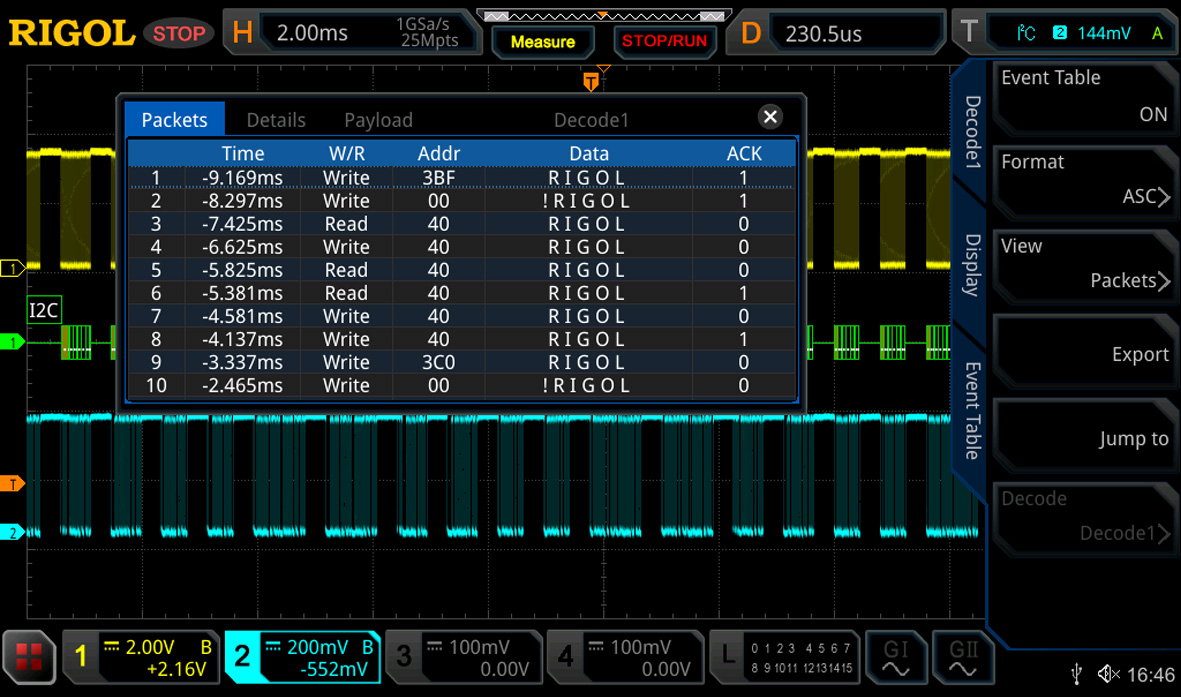
Para capturar más bytes decodificados de los que puede ver en la pantalla utilice la función de tabla de eventos (Figura 6). También puede exportar los resultados de la tabla a un archivo de texto desde el menú de la tabla de eventos para mantener un registro o un análisis de tiempo sin conexión.
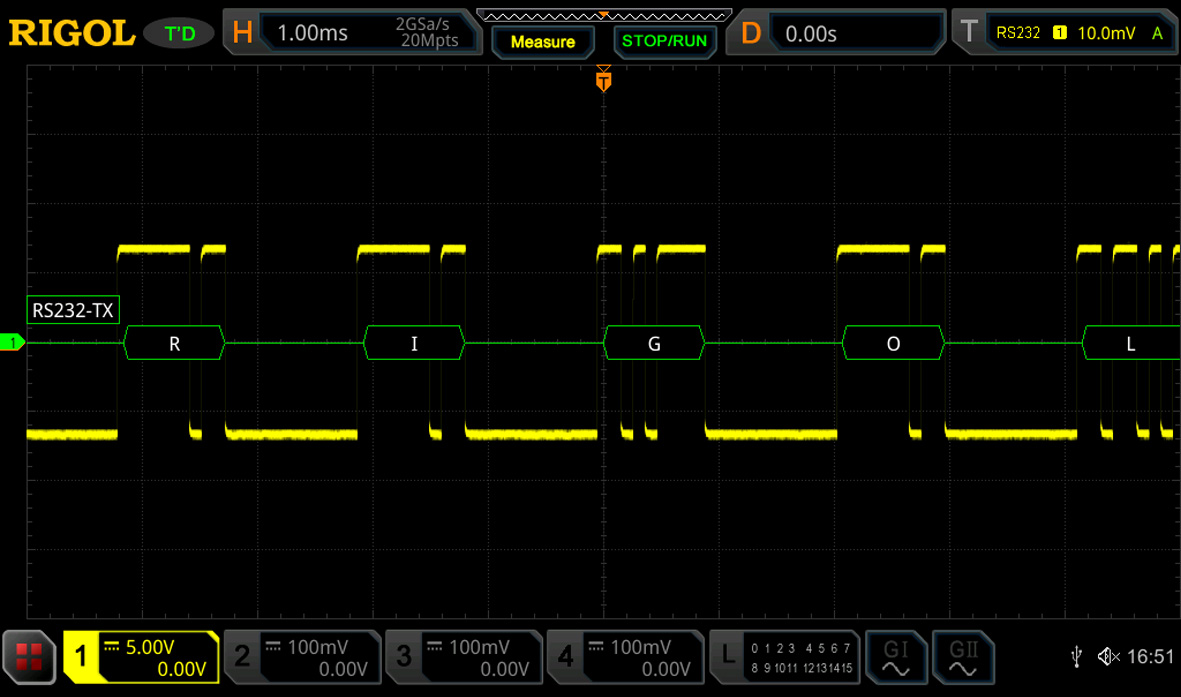
Después de haber configurado y verificado nuestros tiempos de muestreo para obtener los mejores resultados analógicos y de decodificación, también queremos configurar nuestra pantalla para obtener unas condiciones de disparo óptimas. Al disparar en el límite o borde de subida de una señal analógica, asegúrese de mantener el nivel de disparo a una distancia mínima de 1 división del estado de baja de la señal. Esta separación permite una acción de disparo consistente sin falsos disparos. Al visualizar las señales digitales con los canales analógicos, utilice más área de pantalla cuando sea posible. Utilizar unas 2 divisiones verticales y entre 0,5 y 1 división horizontal por carácter de decodificación le permitirá ver cualquier problema importante de sobreimpulso (overshoot) o impedancia, así como algunos de los otros tipos de error que vamos a ver. Esta es la configuración preferida (Figura 7) para monitorizar los datos decodificados en un bus como el RS232.
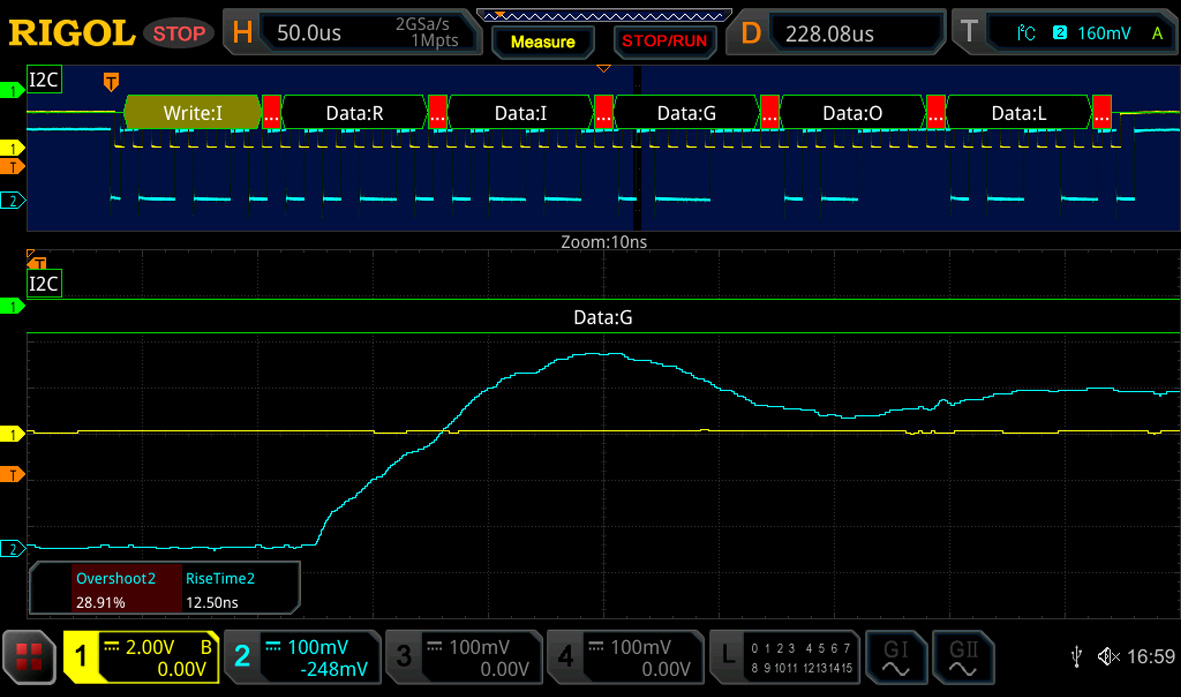
En un bus más complejo como el I2C vemos tanto las líneas de reloj como las de datos en la pantalla. La correlación de tiempos entre los buses multi-línea es, por supuesto, vital para el éxito de la decodificación. Hacer mediciones críticas en la pantalla, como el tiempo de subida (risetime) y el sobreimpulso (overshoot) de cada línea, hace que las pruebas de fiabilidad sean sencillas de configurar. Además del tiempo de subida y el sobreimpulso de las 4 líneas del bus serie, también se puede ver la fluctuación del reloj en comparación con la transición de datos. En la (Figura 8) ampliamos la transición de datos para obtener una medición más precisa del tiempo de subida y el sobreimpulso.
Datos
La clave de cualquier aplicación en serie de Baja Velocidad es la capacidad de ver rápida y fácilmente los datos que se transmiten. Esto significa añadir la capacidad de hacer decodificación embebida en su osciloscopio. La decodificación afecta tanto al disparo como a la visualización en el osciloscopio. Añade una visualización del bus decodificado a la pantalla del instrumento. Puede decodificar valores como ASCII o como datos hexadecimales, octales o binarios, dependiendo de lo que quiera ver. También puedes disparar sobre estos valores para asegurarte de que estás viendo los paquetes que más te interesan. Además de disparar sobre estas señales con el disparador específico de decodificación, también puedes disparar sobre cualquier tipo de señal con un disparador de zona que te permite no sólo disparar sobre cualquier tipo de señal sino también excluir cualquier ruido o dato no deseado de una señal. Estos se crean simplemente dibujando un rectángulo en la pantalla del instrumento.
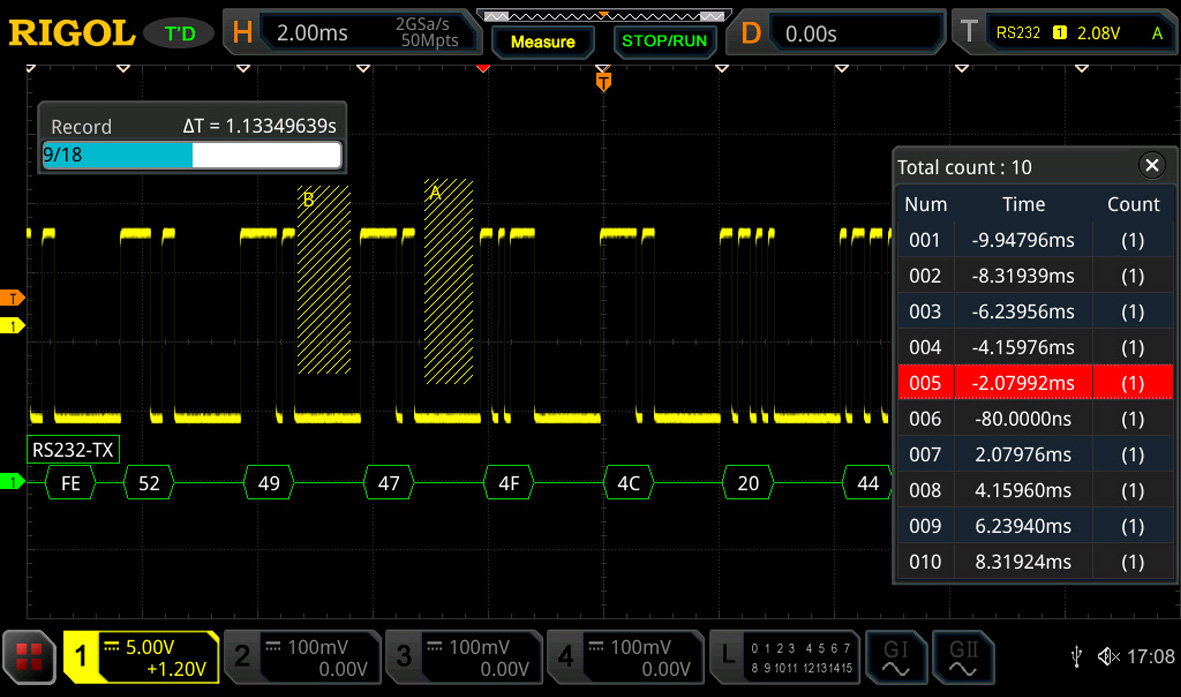
En la Figura 9 se utilizan como ejemplo dos zonas de disparo. El osciloscopio se dispara si estas dos zonas no son atravesadas por una señal. Esta señal también se puede visualizar a través del menú de búsqueda y navegación. De esta manera, se pueden mostrar múltiples puntos de disparo y navegar fácilmente por la señal cuando el osciloscopio ha terminado de escanear. Todos los puntos de disparo se muestran en el menú de búsqueda y navegación y se corresponden con los triángulos blancos de la parte superior de la pantalla. El punto de disparo resaltado en la tabla se corresponde con el triángulo rojo de la parte superior de la pantalla. Para ver cómo difieren los segmentos decodificados a lo largo del tiempo, o para comparar los eventos disparados cuando otras señales podrían afectar a los resultados, a menudo el mejor método de análisis es utilizar el modo de grabación. El modo de grabación de RIGOL permite la adquisición de miles de fotogramas alrededor de un evento de disparo. Por ejemplo, la figura 9 muestra 18 fotogramas con 50 Mpts cada uno. Esto significa que se registran 900 Mpts con la MSO5000.
Estas grabaciones también pueden almacenarse y reproducirse en forma de película, pero las funciones de análisis permiten buscar fallos o valores atípicos al tiempo que se visualizan los datos descodificados para su comparación. Los errores de datos, así como el proceso de depuración, están siempre estrechamente ligados al protocolo y a sus especificaciones. Para ser eficiente con su equipo de pruebas, asegúrese de que está utilizando el mejor método de análisis para ver fácilmente los datos que necesita ver sin que resultados extraños se interpongan en su camino.
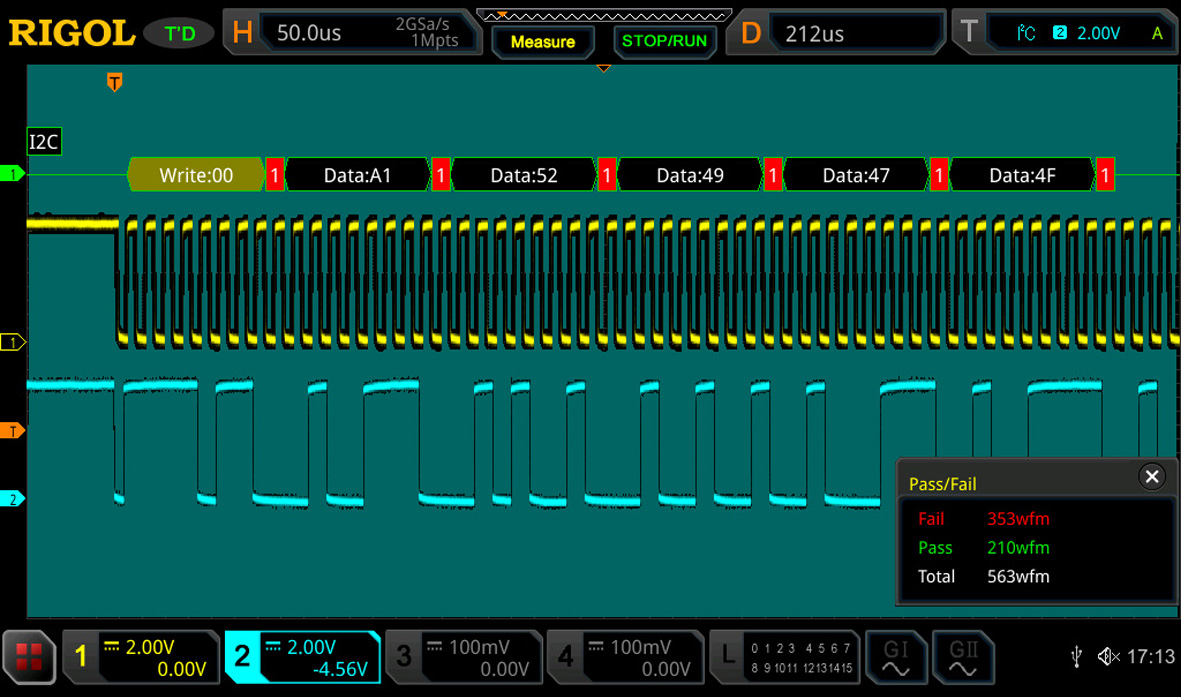
Otro método para encontrar errores es el uso de una máscara de pasa/no pasa (Figura 10). Aquí se puede mostrar información en la que se cuenta el número de fotogramas buenos/con fallos. En esta prueba, el dispositivo se puede configurar para que se guarde una captura de pantalla en el dispositivo por cada fallo o que la salida pasa/falla en la parte posterior genere una señal TTL por cada fallo.
Claves a Tener en Cuenta
Sobremuestreo y ancho de banda adecuados
Como se ha comentado, un muestreo adecuado es fundamental para realizar mediciones correctas, así como para depurar completamente su señal en serie de baja velocidad. Una buena regla general para las señales analógicas es 5 veces el ancho de banda de la señal que desea medir. Esto limita su error de tiempo de subida a alrededor del 2%. Para ver el mejor detalle de los componentes de la señal de alta frecuencia, configure su osciloscopio para lograr también un sobremuestreo de 5-10X. Cuando se trata de señales digitales esto significa muestrear 5 veces en el ancho de un bit. Cuando el muestreo se realiza en líneas digitales o para el muestreo que se utilizará para la decodificación, el sobremuestreo es menos importante, pero configure su dispositivo de medida para que sea tan similar como el receptor LSS que utilizará finalmente. De este modo, tendrá la mejor oportunidad de centrarse en los errores materiales que causarán problemas en el futuro. La serie MSO5000, por ejemplo, tiene un ancho de banda máximo de 350 MHz y 8 GSa/sg.
Conexión a tierra, ruido y señalización diferencial
El sondeo adecuado y la comprensión del uso de señales diferenciales frente a señales referenciadas a tierra es importante para la depuración. Si sus líneas de datos no están referenciadas a tierra, asegúrese de comprender el impacto de los bucles de tierra y el ruido acoplado a tierra en sus mediciones. Utilice técnicas de sondeo adecuadas y funciones avanzadas de cancelación de ruido en el osciloscopio para limitar las fuentes de ruido. Si es necesario, añada sondas diferenciales a su sistema de medida para mejorar la calidad de las mediciones.
Cómo visualizar mejor las señales en serie de baja velocidad
Existen varios métodos para analizar, visualizar y evaluar la actividad del bus LSS en un osciloscopio moderno. La mejor manera difiere en función de si desea observar una sola transición de bits para el ruido, la velocidad o la sincronización; si desea observar un paquete completo de datos; o si desea comparar paquetes y la sincronización de paquetes durante un período de tiempo más largo. Asegúrese de que sus equipos de sobremesa le permiten ver todo lo que necesita y familiarícese con funciones como el zoom, el modo de grabación, la búsqueda y la navegación, las tablas de eventos, la memoria profunda y las mediciones automáticas, así como con la forma en que interactúan y la mejor manera de realizar la transición entre ellas al considerar su plan de pruebas. Lo ideal es que un osciloscopio le permita ver todos los resultados que necesita y cambiar rápidamente de modo para tener información adicional.
Conclusiones
El diseño embebido y la depuración de datos digitales es un requisito de prueba cada vez mayor en una amplia gama de aplicaciones industriales y de consumo. Disponer del osciloscopio de señal mixta adecuado, como la serie MSO5000, puede facilitar y agilizar la visualización, el análisis y la resolución de problemas de temporización, ruido, calidad de la señal y datos. Esto mejora la eficiencia de la ingeniería y el tiempo de comercialización. La línea de osciloscopios UltraVision II de RIGOL viene con capacidades estándar u opcionales para los métodos y las mediciones que se discuten aquí y son potentes instrumentos de sobremesa que proporcionan un rendimiento sin concesiones a un valor sin precedentes.

