Implementación del posicionamiento de alta precisión a espacios interiores
Erik Carlberg, Senior Product Manager, Product Strategy Short Range Radio, u-blox
Bluetooth ofrece en la actualidad una nueva respuesta a la cuestión del posicionamiento de alta precisión en espacios interiores. Hemos ensayado una prueba de concepto basada en esta tecnología en un almacén industrial.
La localización es una de las principales ventajas que ha aportado la tecnología IoT a empresas y consumidores. Por un precio ajustado, los responsables de las flotas pueden realizar el seguimiento de sus vehículos, las empresas de logística hacen lo mismo con las mercancías que envían y los granjeros con su ganado, todo ello en tiempo real. Además, todos podemos comprar un dispositivo conectado para cuidar de un familiar de edad avanzada, de nuestras mascotas o de pertenencias valiosas como un coche.
La tecnología de localización, que es posible gracias sistemas globales de satélites de navegación (global navigation satellite systems, GNSS) como GPS, GLONASS, BeiDou y Galileo, se ha introducido en casi todos los ámbitos de nuestra economía de nuestras vidas diarias. La tecnología GNSS ha ido mejorando año tras año y su exactitud ha pasado del orden de metros a apenas unos centímetros, mientras que el tiempo de conexión pasado de decenas de segundos a segundos y su cobertura se ha ido ampliando hasta cubrir las áreas urbanas con mayor densidad.
Sin embargo, el posicionamiento de alta precisión sigue teniendo una gran zona oscura: los espacios interiores. Las débiles señales de GNSS no lograr penetrar adecuadamente en la mayoría de los espacios interiores. Como resultado de ello, las mejoras en la eficiencia que proporciona conocer la localización de manera continua son ajenas a innumerables actividades:
Seguimiento de dispositivos médicos, pacientes y personal en hospitales.
Optimización de la gestión del equipaje y localización de pasajeros que llegan con retraso en aeropuertos.
Automatización de procesos de producción en empresas de fabricación.
Seguimiento del comportamiento del cliente y operaciones de backend en empresas de servicios y comercio minorista.
Modernización de las operaciones con robots en almacenes.
Dado que las señales de los satélites no suelen estar disponibles en estos espacios, se ha sugerido una serie de tecnologías alternativas para cubrir el vacío existente. Por ejemplo, los dispositivos equipados con módems celulares pueden recurrir a señales celulares para obtener una estimación de la posición respecto a las estaciones móviles más cercanas, utilizando para ello la denominada huella digital de la red o técnicas más sofisticadas basadas en el tiempo de vuelo. Los dispositivos con conexión a Wi-Fi pueden utilizar métodos similares para su localización respecto a puntos de acceso a Wi-Fi. Los dispositivos con conexión a Bluetooth pueden aprovechar el indicador de intensidad de señal recibida (received signal strength indicator, RSSI) para obtener una estimación de la distancia aproximada a las balizas de Bluetooth instaladas.
Huella digital Wi-Fi
Tiempo de vuelo Wi-Fi
Bluetooth RSSI
Bluetooth AoA
Exactitud*
10 m
1-2 m
5-10 m
0,5-1,0 m
Consumo
Alto
Alto
Medio
Bajo
Coste de instalación
Bajo
Medio
Bajo
Medio
Coste del dispositivo
Alto
Alto
Bajo
Bajo
*Cifras aproximadas: los valores exactos dependen de cada instalación.
Sin embargo, todas estas tecnologías padecen limitaciones que han restringido su uso en los entornos de aplicación citados, donde la exactitud, la disponibilidad, la facilidad de uso y el coste asequible de la tecnología GNSS han puesto el listón muy alto. Las tecnologías de localización basadas en redes celulares y Wi-Fi exigen unos costes relativamente elevados del hardware que no cumplen las expectativas. Pese a su baja exactitud, Bluetooth RSSI ha logrado introducirse en aplicaciones que exigen una localización exacta dentro de una sala gracias a su bajo coste, bajo consumo y compatibilidad con la mayoría de los dispositivos conectados.
En 2019, el Bluetooth SIG potenció su presencia en el posicionamiento dentro de espacios interiores con la presentación de Bluetooth Direction Finding. La propuesta, que utiliza un nuevo tipo de señal Bluetooth y matrices multiantena para medir el ángulo que describe el recorrido de un mensaje Bluetooth entre una etiqueta móvil y uno o más puntos estáticos de anclaje, ofrece una nueva respuesta potencial a la cuestión del posicionamiento en espacios interiores que puede cumplir todos los requisitos por primera vez: alta precisión, fácil instalación, bajo coste del dispositivo y bajo consumo de energía.
Desde que fueron presentadas, las soluciones de posicionamiento en espacios interiores basadas en Bluetooth han generado un interés considerable. ABI Research prevé un crecimiento medio interanual del 28,3% para las ventas de etiquetas Bluetooth entre 2019 y 2025. El mayor incremento se espera con mucha diferencia (64,2%) en las oficinas inteligentes y en cifras absolutas (más de 163 millones) en el segmento de almacenes y logística. Debido a su complementariedad con nuestras soluciones GNSS para exteriores, al enorme ecosistema global de empresa que desarrollan soluciones basadas en esta tecnología, su bajo consumo y bajo coste, así como a la exactitud de posicionamiento por debajo de un metro que es capaz de proporcionar, en
u-blox hemos destinado una parte considerable de nuestras actividades de I+D a promover la adopción de esta tecnología.
Cómo ofrece Bluetooth un posicionamiento de alta precisión en espacios interiores
El posicionamiento de Bluetooth en espacios interiores se basa en la tecnología Bluetooth Direction Finding. Como indica su nombre, esta tecnología disponible en dos modalidades permite determinar la dirección en la que se mueve una señal Bluetooth entre una etiqueta móvil y un punto de anclaje fijo. En el caso del ángulo de llegada (angle of arrival, AoA), el punto de anclaje calcula la dirección la señal entrante que ha sido transmitida por la etiqueta. En el caso del ángulo de salida (angle of departure, AoD) los papeles se invierten y la etiqueta se encarga de calcular el ángulo con el que se transmitió la señal desde el punto de anclaje.
En este artículo nos centraremos en el AoA, que es más adecuado para las soluciones de posicionamiento en espacios interiores, mientras que AoD es más ventajosa para soluciones de navegación en espacios interiores.
Para evaluar la tecnología hemos construido una demostración de Bluetooth Direction Finding basada en AoA en nuestras oficinas de Malmö (Suecia). En esta demostración hemos programado un servomecanismo montado sobre un punto de anclaje para cálculo de dirección con el fin de realizar el seguimiento de una etiqueta Bluetooth en movimiento a partir del ángulo de llegada calculado en tiempo real.
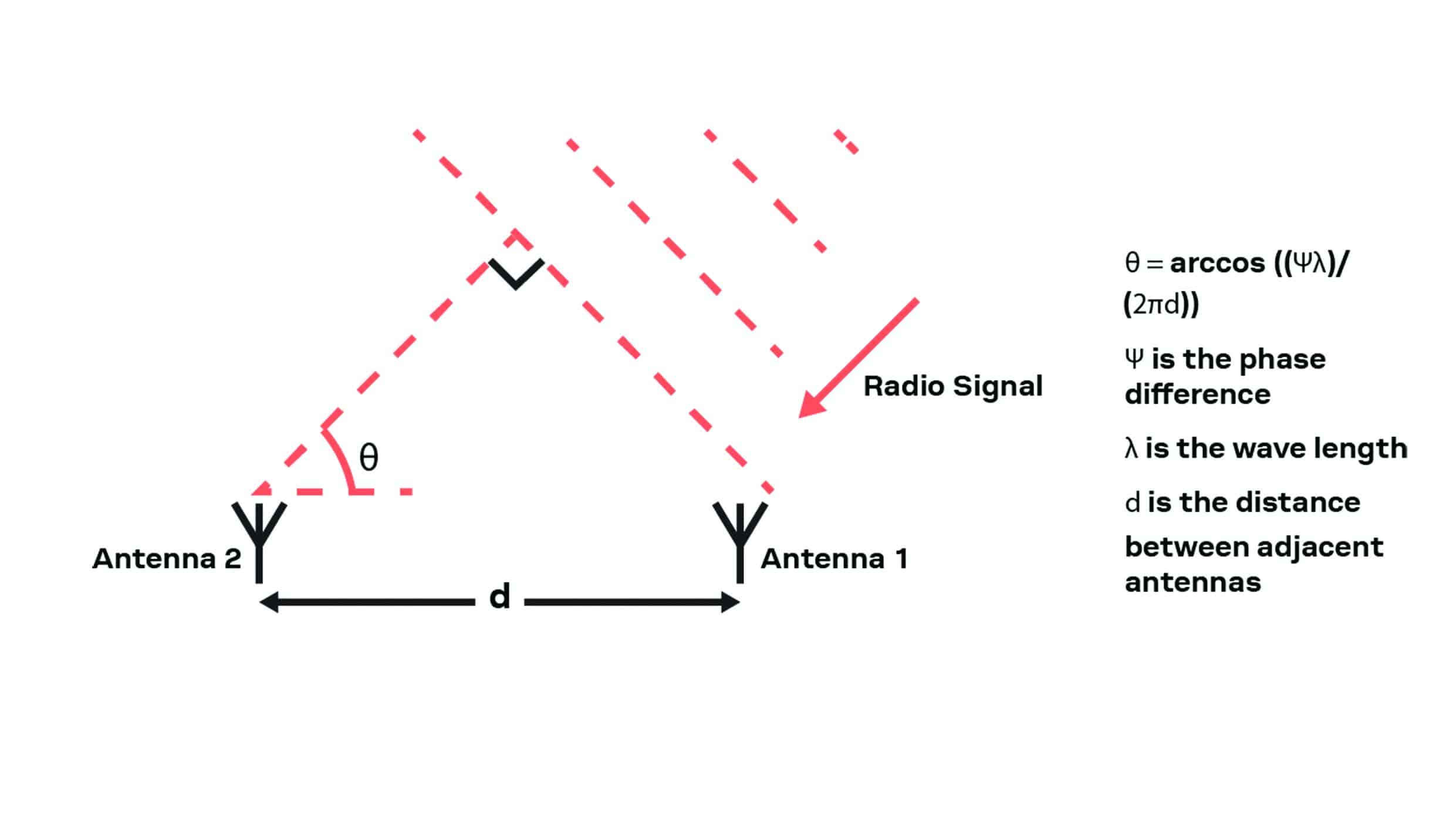
El funcionamiento de Bluetooth Direction Finding se fundamenta en dos secretos. El primero de ellos es una nueva señal en Bluetooth Direction Finding que incorpora otros datos y se denomina extensión de tono constante (constant tone extensión, CTE). Mientras que el resto del mensaje Bluetooth se modula para transportar datos, CTE consiste tan solo en una cadena de “unos”. Como resultado de ello, el receptor puede utilizar esta parte del mensaje para medir con exactitud las diferencias de fase entre señales. Lo cual nos lleva hasta el segundo secreto acerca de su funcionamiento: cada punto de anclaje incorpora no una única antena sino una matriz multiantena.
La figura superior muestra cómo la señal para determinar la dirección emitida por la etiqueta móvil llega hasta cada una de las antenas de la matriz en el punto de anclaje estático. Debido a la diferencia en la distancia recorrida, cada antena recibe la señal con una pequeña diferencia de fase respecto a las otras, y se puede medir gracias a CTE. Los algoritmos ejecutados en un microcontrolador integrado en el punto de anclaje pueden analizar estos datos a continuación con el fin de calcular el ángulo de llegada de la señal con una exactitud aproximada de +/- X grados.
Cuando se utilizan varios puntos de anclaje en lugar de un solo, los ángulos de llegada procedentes de varios puntos de anclaje se pueden emplear para triangular la localización aproximada del rastreador. Esto exige introducir las posiciones y las orientaciones precisas de los puntos de anclaje en el motor de posicionamiento, que a continuación ejecuta otro algoritmo para calcular la localización – en 2D o en 3D – del activo con la etiqueta a partir de los ángulos de llegada calculados por cada punto de anclaje.
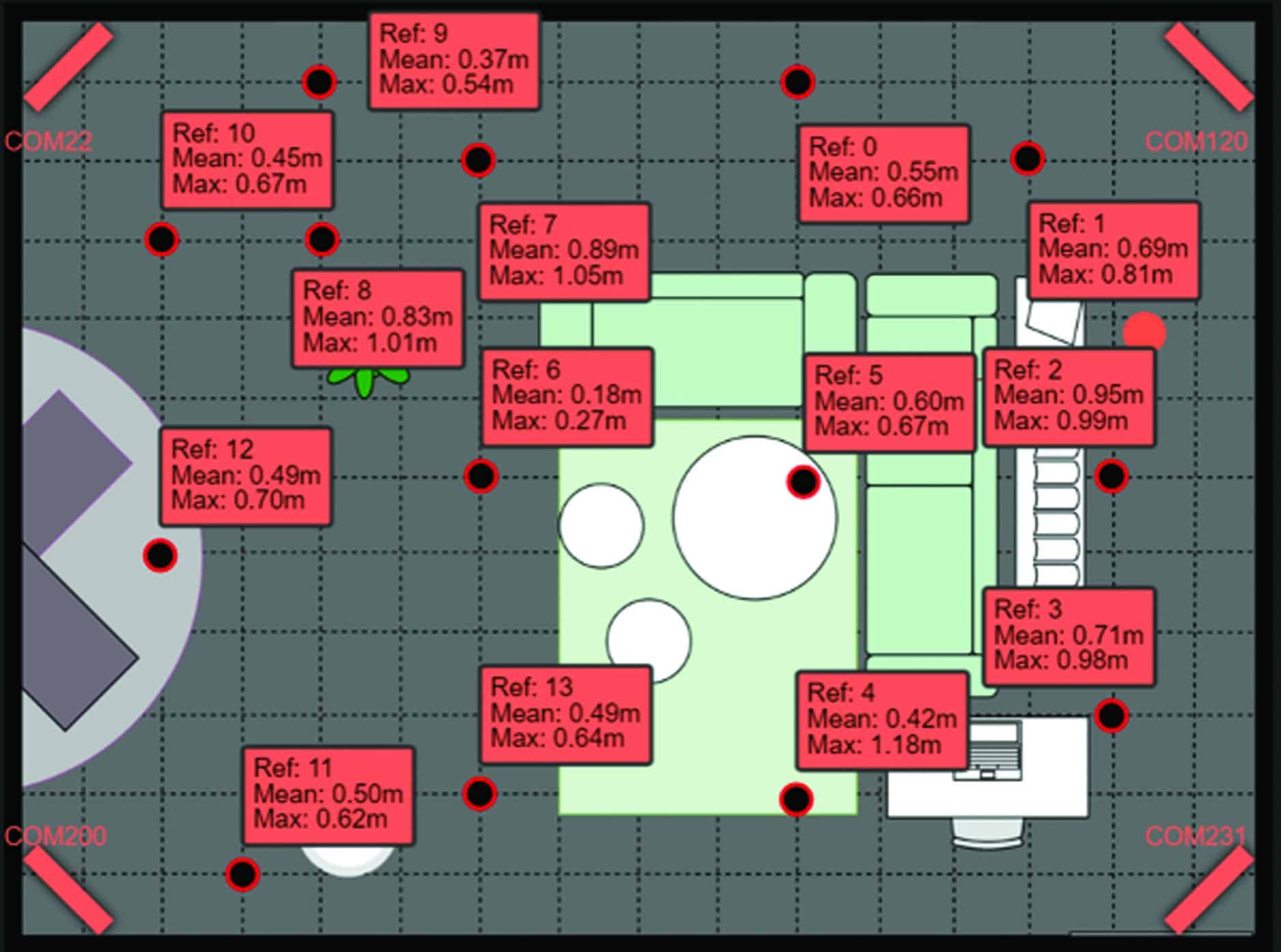
En una oficina de 8 por 6 metros con cuatro puntos de anclaje montados en las esquinas hemos logrado una exactitud media de menos de 1 metro con una probabilidad del 95%.
Ensayo de la tecnología en un almacén industrial
Hemos ensayado nuestra solución de posicionamiento para espacios interiores basada en Bluetooth en un almacén industrial del mundo real, una aplicación típica para el rastreo de activos. El almacén, de 30 por 50 metros, tenía estanterías metálicas para almacenar equipos y cajas. Si bien las especificaciones de Bluetooth definen las capas inferiores para manejar los datos de RF en bruto, no establece el algoritmo con el fin de calcular el ángulo de llegada real. Para el ensayo desarrollamos un algoritmo eficiente que se ejecuta en el microcontrolador embebido en el chip Bluetooth y proporciona una gran exactitud y una elevada velocidad de actualización. En concreto, hemos optimizado la etapa de entrada de RF, las antenas, los algoritmos embebidos que se ejecutan en los módulos Bluetooth de los puntos de anclaje y la red principal de conectividad inalámbrica para conectar los puntos de anclaje a una red.
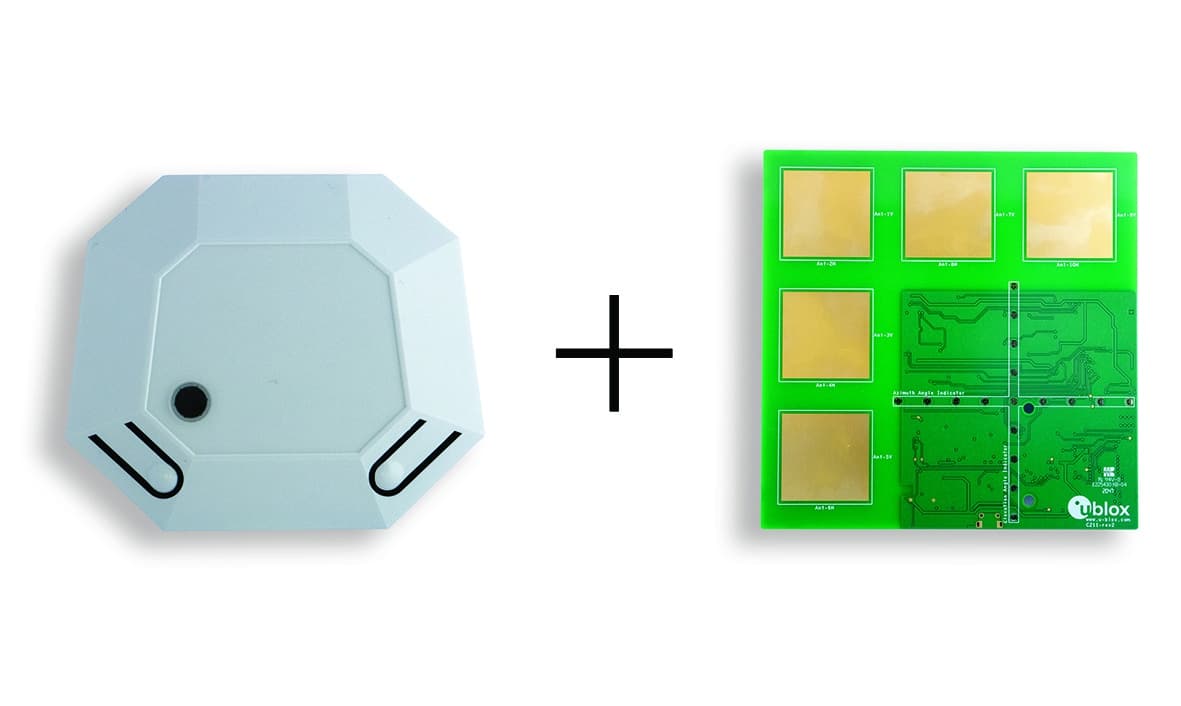
La siguiente imagen muestra una etiqueta Bluetooth y la matriz de antenas con forma de L utilizadas en nuestros puntos de anclaje.
En nuestro ensayo hemos utilizado diez puntos de anclaje para cubrir un espacio con seis metros de altura y una superficie aproximada de 1000 metros cuadrados. Tras una detallada planificación y preparación, la instalación del sistema de posicionamiento resultó sencilla y apenas requirió un par de horas. Para aprovechar al máximo la línea visual entre las etiquetas del rastreador y las matrices multiantena montamos los puntos de anclaje a una distancia de entre tres y cinco metros del suelo.
Hemos simplificado la instalación mediante el uso de software de rastreo de terceros, en nuestro caso Traxmate, que facilita la introducción de las posiciones y las orientaciones de los puntos de anclaje así como la configuración del motor de posicionamiento mediante una API integrada. Finalmente, hemos establecido una red principal de comunicaciones Wi-Fi entre cada punto de anclaje y el motor de posicionamiento.
En nuestro ensayo hemos dedicado un gran esfuerzo a diseñar una configuración que consiguiera un rendimiento fiable en un entorno interior que acababa en gran parte con la complejidad que caracteriza a muchas instalaciones en espacios interiores. En primer lugar, hemos colocado estratégicamente los puntos de anclaje para obtener la máxima probabilidad de disponer de línea visual entre todas las posiciones plausibles de las etiquetas y al menos tres puntos de anclaje. Además, tuvimos que lidiar con las múltiples rutas provocadas, por ejemplo, cuando las señales de radio rebotan en las paredes. Entre los algoritmos ejecutados en nuestros puntos de anclaje para calcular los ángulos se encuentra la atenuación de múltiples rutas y el suministro de un rendimiento robusto, incluso en un entorno tan complicado para la señal de radio como nuestro almacén.
Nuestra experiencia al poner en práctica esta prueba de concepto no ha hecho más que consolidar nuestra convicción de que el posicionamiento de alta precisión de Bluetooth en espacios interiores puede cumplir su palabra. Si su instalación es adecuada, puede proporcionar una exactitud de menos de un metro que se espera de las aplicaciones emergentes de posicionamiento en espacios interiores. Como es habitual con los dispositivos Bluetooth, el coste del hardware necesario es muy inferior al de otras tecnologías, al igual que sus requisitos de alimentación. El despliegue de soluciones de posicionamiento en espacios interiores ha sido complicado desde hace mucho tiempo. La integración del hardware que hemos utilizado con las interfaces web como la desarrollada por Traxmate ha ayudado mucho a simplificar su implantación.
A través de Bluetooth Direction Finding, el Bluetooth SIG ha ofrecido una solución muy convincente a la cuestión del posicionamiento en espacios interiores que soluciona muchas de las deficiencias de las soluciones disponibles actualmente en el mercado. Nuestras experiencias con la tecnología en una aplicación del tipo “sígueme”, en la que se determina la dirección para controlar un servomecanismo (que podría sostener una cámara, por ejemplo) encargado del seguimiento del posicionamiento en espacios interiores del tamaño de una oficina, así como en una prueba de concepto dentro de un almacén industrial del mundo real, han demostrado el potencial de estas tecnologías para transformar las aplicaciones en espacios interiores conociendo la localización, del mismo modo que las tecnologías GNSS lo han hecho en el exterior.
Para más información sobre el hardware que hemos utilizado en nuestros ensayos y nuestra prueba de concepto, aprovechar los algoritmos que hemos desarrollado para calcular los ángulos de llegada en cada punto de anclaje y la posición estimada en el motor de posicionamiento, y atenuar las múltiples rutas con el fin de incrementar la fiabilidad de la solución en el mundo real, le animamos a probar nuestros kits para Bluetooth Direction Finding y de exploración de posicionamiento en espacios interiores con Bluetooth contactando con nosotros.
Para ofrecer las mejores experiencias, utilizamos tecnologías como las cookies para almacenar y/o acceder a la información del dispositivo. El consentimiento de estas tecnologías nos permitirá procesar datos como el comportamiento de navegación o las identificaciones únicas en este sitio. No consentir o retirar el consentimiento, puede afectar negativamente a ciertas características y funciones.
Funcional
Siempre activo
El almacenamiento o acceso técnico es estrictamente necesario para el propósito legítimo de permitir el uso de un servicio específico explícitamente solicitado por el abonado o usuario, o con el único propósito de llevar a cabo la transmisión de una comunicación a través de una red de comunicaciones electrónicas.
Preferencias
El almacenamiento o acceso técnico es necesario para la finalidad legítima de almacenar preferencias no solicitadas por el abonado o usuario.
Estadísticas
El almacenamiento o acceso técnico que es utilizado exclusivamente con fines estadísticos.El almacenamiento o acceso técnico que se utiliza exclusivamente con fines estadísticos anónimos. Sin un requerimiento, el cumplimiento voluntario por parte de tu Proveedor de servicios de Internet, o los registros adicionales de un tercero, la información almacenada o recuperada sólo para este propósito no se puede utilizar para identificarte.
Marketing
El almacenamiento o acceso técnico es necesario para crear perfiles de usuario para enviar publicidad, o para rastrear al usuario en una web o en varias web con fines de marketing similares.