EtherCAT: El bus de campo Ethernet rápido y determinista para la automatización industrial y la robótica
En el ámbito de la automatización industrial y el control de movimiento, la necesidad de comunicaciones que no solo sean rápidas y fiables, sino también deterministas es crucial. EtherCAT (Ethernet para Tecnología de Automatización de Control) se ha consolidado como una solución líder para satisfacer estas necesidades, ampliando las capacidades del protocolo Ethernet estándar para aplicaciones en tiempo real.
Historia y desarrollo de EtherCAT
EtherCAT fue desarrollado originalmente por Beckhoff Automation, un importante fabricante de PLC para automatización industrial y sistemas de control en tiempo real. Beckhoff había desarrollado LightBus a finales de la década de 1980 para abordar los problemas de ancho de banda de otros protocolos. El desarrollo posterior de este protocolo condujo a la invención de EtherCAT. La tecnología EtherCAT se introdujo a nivel mundial en 2003. En 2004, Beckhoff cedió los derechos de la tecnología al Grupo Tecnológico EtherCAT (ETG), organización que desde entonces se ha encargado de promover y desarrollar el estándar. El ETG es actualmente la mayor organización de usuarios de Ethernet Industrial del mundo, con más de 6500 empresas miembro de 69 países. EtherCAT está estandarizado internacionalmente desde 2007 en las series de normas IEC 61158 y 61784, así como en la norma ISO 15745-4. El perfil del variador está estandarizado en la norma IEC 61800-7. La extensión para la seguridad funcional, «Safety over EtherCAT» (FSoE), se estandarizó internacionalmente en la norma IEC 61784-3-12 en 2010. EtherCAT también es un estándar nacional en países como China (GB/T 31230) y Corea del Sur (GB/T 36006 para Safety over EtherCAT).
EtherCAT vs. Ethernet estándar. Principales Diferencias
Si bien EtherCAT se basa en las capas físicas y de enlace de datos (Capas 1 y 2 del modelo OSI, IEEE 802.3) de Ethernet estándar, las diferencias cruciales que lo hacen adecuado para aplicaciones en tiempo real residen en su principio operativo y el uso de las capas superiores del modelo OSI.
Principio operativo (procesamiento «On the Fly»)
La diferencia fundamental con respecto a Ethernet es el «procesamiento On the Fly», o “sobre la marcha”. En lugar de que cada nodo reciba, interprete y copie el paquete de datos completo, como ocurre en Ethernet estándar, en una red EtherCAT el maestro envía una trama con datos para todos los esclavos. A medida que la trama pasa por cada dispositivo esclavo, este lee los datos dirigidos a él e inserta sus propios datos (por ejemplo, datos de entrada) en la misma trama mientras esta ya está en movimiento. Esto elimina los retrasos de procesamiento en cada nodo y maximiza el uso del ancho de banda.
Determinismo y Gestión de Colisiones
Ethernet estándar se concibió originalmente como no determinista y, por lo tanto, inicialmente no era adecuado para el control en tiempo real. Su protocolo permite colisiones de paquetes de datos. EtherCAT, por otro lado, está optimizado para la comunicación determinista. Utiliza una arquitectura maestro-esclavo donde solo el maestro envía telegramas. Los esclavos procesan los telegramas del maestro e insertan sus datos. Esto elimina las colisiones inherentes a Ethernet estándar.
Uso de Capas OSI
Para lograr tiempos de ciclo rápidos, EtherCAT omite por completo las capas de red (IP) y transporte (TCP, UDP) del modelo Ethernet OSI. Estos protocolos de TI aún pueden «tunelizarse» a través de EtherCAT si es necesario (Ethernet sobre EtherCAT – EoE).
Sincronización de Precisión
EtherCAT emplea un mecanismo de reloj distribuido (Distributed Clocks – DC) que permite una sincronización horaria extremadamente precisa entre todos los esclavos. El jitter (variación del retardo) es significativamente inferior a 1 µs, a menudo del orden de nanosegundos (<100 ns). Esta precisión es equivalente al estándar IEEE 1588 PTP (Protocolo de Tiempo de Precisión) y no requiere hardware especial en el maestro. Los esclavos retienen la hora del primer esclavo en el telegrama y utilizan esta referencia para ajustar sus relojes internos.
Topología
A diferencia de Ethernet tradicional, que suele requerir conmutadores, EtherCAT no requiere conmutadores ni concentradores en la mayoría de las configuraciones. Admite una gran variedad de topologías (línea, árbol, anillo, estrella o combinaciones) sin pérdida de rendimiento. La topología de anillo permite redundancia de cable. La distancia entre dos nodos puede ser de hasta 100 m con cables estándar, ampliable a más de 2 km con fibra óptica.
Flexibilidad y diagnóstico
El maestro EtherCAT puede detectar automáticamente cambios en la topología, direccionar esclavos (eliminando la necesidad de direccionamiento manual) y gestionar la conexión/desconexión de nodos en caliente (Hot Connect). El sistema de diagnóstico detecta perturbaciones con precisión y rapidez, identificando segmentos críticos mediante contadores de errores. Las herramientas Ethernet estándar permiten la monitorización del tráfico de datos.
En resumen, mientras que Ethernet estándar es flexible para la transferencia de datos no críticos en el tiempo, EtherCAT está específicamente optimizado para la comunicación determinista en tiempo real necesaria en aplicaciones de control y automatización, ofreciendo alto rendimiento, sincronización precisa y flexibilidad topológica sin la complejidad de los switches ni el no determinismo del Ethernet tradicional.
Principales aplicaciones de EtherCAT
Gracias a su alta velocidad, determinismo y fiabilidad, EtherCAT es una solución ideal para una amplia gama de aplicaciones en automatización industrial y otras áreas:
Control de movimiento: Se considera el protocolo Ethernet industrial en tiempo real más rápido disponible y es especialmente adecuado para aplicaciones de control de movimiento de alto rendimiento donde la velocidad y la sincronización son cruciales.
Automatización industrial: Se utiliza ampliamente para interactuar con diversos dispositivos de campo, como variadores de velocidad (servovariadores), sistemas de E/S, sensores, válvulas, sistemas de visión y componentes mecatrónicos.
Robótica: Se utiliza ampliamente en robótica, incluyendo robots industriales, médicos y humanoides.
Sistemas de medición y adquisición de datos (DAQ): Las avanzadas características del protocolo permiten un eficiente procesamiento de datos síncrono en sistemas de medición distribuidos. Los sistemas DAQ compatibles con EtherCAT pueden proporcionar datos en tiempo real a los controladores maestros o funcionar como controladores.
Aplicaciones exigentes: Se utiliza en sectores que requieren alta precisión y fiabilidad, como la fabricación de semiconductores, máquinas de embalaje, máquinas de impresión, centrales eléctricas, bancos de pruebas, aerogeneradores, sistemas de control de túneles y sistemas de seguridad.
Integración con sistemas IT/OT: EtherCAT admite la integración con sistemas de alto nivel como MES (Sistema de Ejecución de Fabricación) y ERP (Planificación de Recursos Empresariales), a menudo mediante la cooperación con estándares como OPC UA (OLE para Arquitectura Unificada de Control de Procesos).
EtherCAT en Robótica
La robótica, en particular la robótica avanzada y de servicios, requiere rendimiento en tiempo real, alta respuesta dinámica y coordinación multieje. El control de movimiento, fundamental en la robótica, depende en gran medida de la tecnología de la comunicación. De hecho, los robots modernos no se consideran ejes individuales, sino sistemas completos que se mueven de forma dinámica y sincrónica. Esto requiere tiempos de ciclo inferiores a milisegundos y una sincronización precisa para el escaneo de la posición y el control de sistemas con múltiples grados de libertad (DOF). EtherCAT, gracias a su alta velocidad y sincronización precisa, ocupa una posición líder en estas aplicaciones, logrando un jitter inferior a 100 ns, incluso en redes sin un reloj de precisión en el maestro, ya que los nodos comparten la hora del reloj.
En sistemas robóticos, EtherCAT se utiliza a menudo para conectar el maestro (controlador principal) a esclavos, como servoaccionamientos y sistemas de E/S. La topología flexible de EtherCAT, compatible con líneas, anillos, árboles, estrellas y combinaciones, se adapta perfectamente a la estructura física de los robots y a la necesidad de integrar sensores y herramientas.
Enfoque y soluciones de Gigadevice para el control de motores en robótica
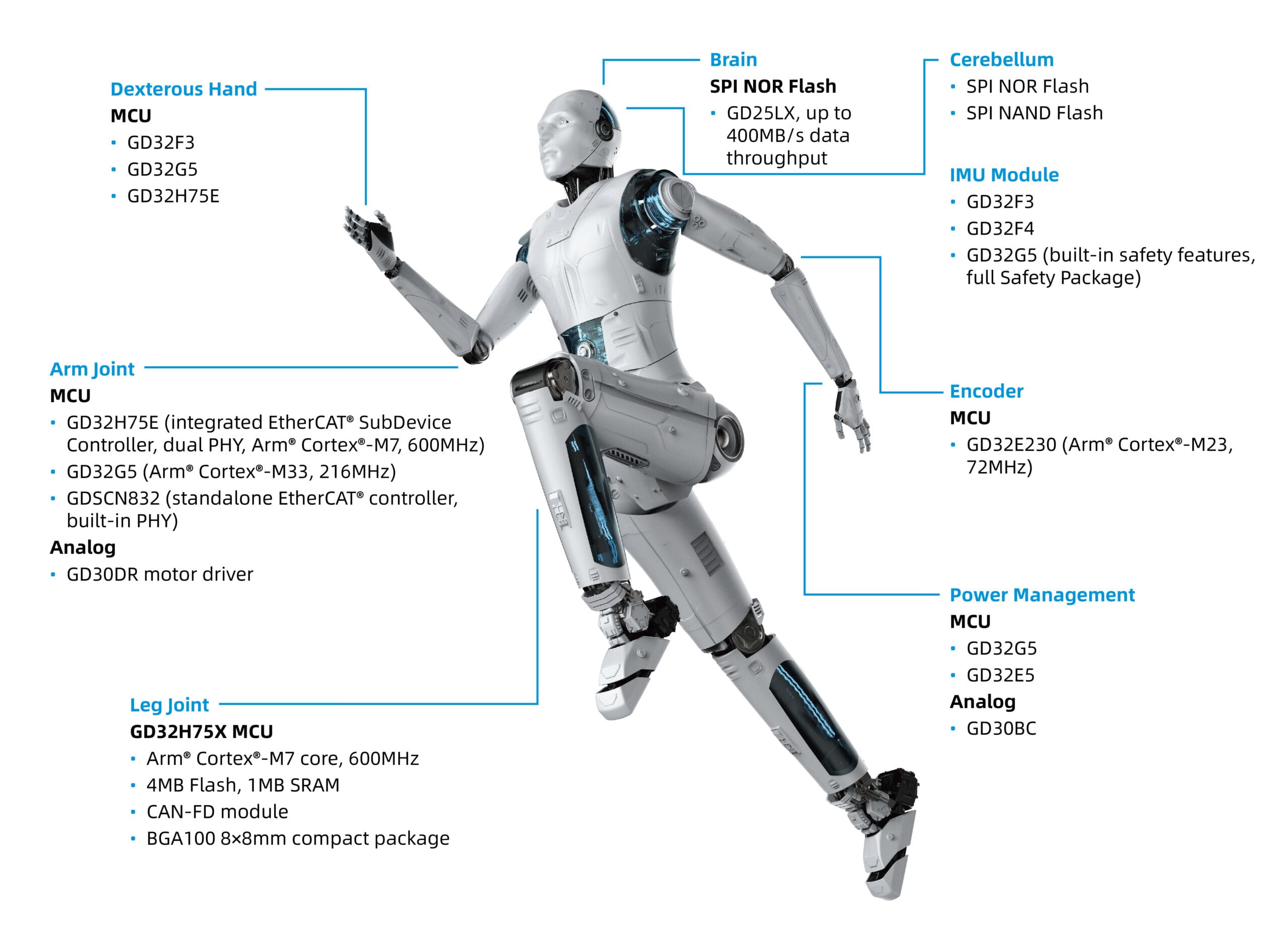
Un robot cuenta con numerosos grados de libertad y articulaciones, y cada articulación tiene sus propios requisitos de carga. Para completar una acción, las distintas articulaciones deben coordinarse con precisión. Hay dos puntos clave a destacar: el primero es que el diseño de hardware individual de cada articulación debe ser excelente, y el segundo es que se debe formar un sistema de red de bucle cerrado en tiempo real entre las articulaciones para una comunicación eficiente, generalmente utilizando el estándar EtherCAT®.
Algunos clientes utilizan más de 20 MCU de núcleo M7, además de más de 10 MCU de núcleo M33 para gestionar diferentes tareas articulares. Estas articulaciones se comunican a través de buses integrados para garantizar la sincronización de movimiento y datos entre ellas.
GigaDevice ofrece una amplia gama de productos, incluyendo microcontroladores (MCU), memorias Flash y DRAM, y chips analógicos. Es reconocido como uno de los pioneros en el suministro de chips y ofrece un enfoque integral para el mercado de la automatización y la robótica, en particular para las nuevas necesidades de los robots. En comparación con el control de motores tradicional, los robots imponen requisitos más estrictos en términos de alta respuesta dinámica, coordinación multieje, eficiencia energética y comunicación en tiempo real.
Para satisfacer estas necesidades, Gigadevice ha desarrollado soluciones de hardware específicas. De hecho, sus soluciones MCU están diseñadas para las diversas necesidades de control en las distintas articulaciones de un robot.
La arquitectura de control propuesta por Gigadevice para robots implica el uso de MCU de alto rendimiento (núcleos M7 y M33) en cada articulación o grupo de articulaciones. Estos MCU se comunican entre sí mediante buses integrados, a menudo basados en el estándar EtherCAT, para garantizar la sincronización de movimiento y datos.
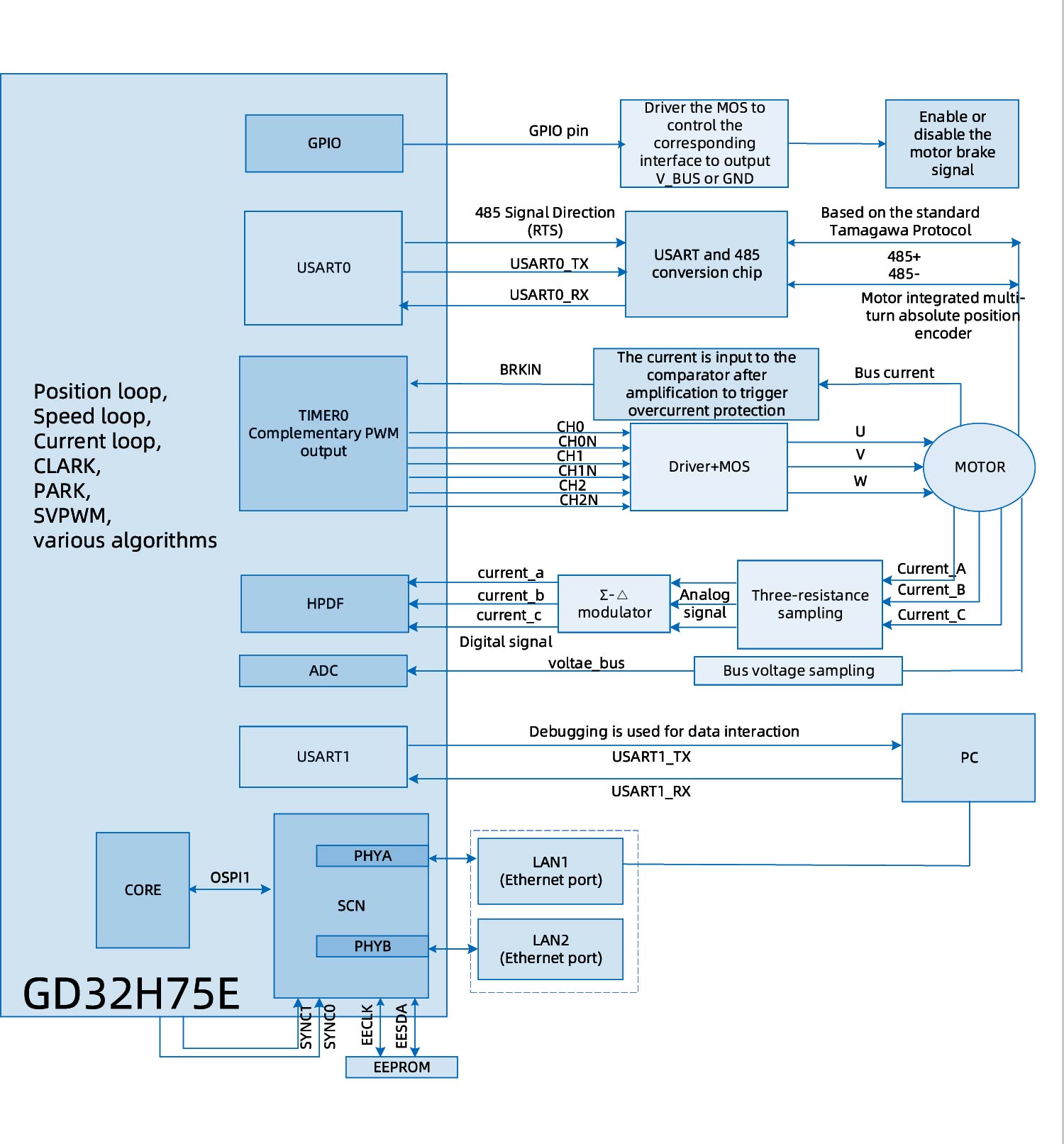
Gigadevice ofrece el procesador MCU GD32H75E, basado en el potente núcleo ARM® Cortex®-M7 de 600 MHz. Este MCU proporciona una gran potencia de procesamiento para el control en tiempo real. Integra un controlador de subdispositivo EtherCAT y dos PHY internos, así como aceleradores de hardware FPU/DSP, para satisfacer los requisitos de servocontrol de alta dinámica y control de movimiento complejo. El GD32H75E admite una arquitectura de bus dual EtherCAT + CAN FD. Este diseño garantiza una sincronización multieje de microsegundos, reduciendo la latencia de la comunicación y permitiendo la interacción de datos a alta velocidad entre las múltiples articulaciones de un robot.
Para tareas que requieren control y actuación de sensores con respuesta en tiempo real de nanosegundos, Gigadevice ofrece la serie de MCU GD32G5 (con núcleo ARM® Cortex®-M33 de 216 MHz). Esta serie está optimizada para sistemas robóticos de detección y ejecución, con características como ADC/DAC de alta precisión y temporizadores de alta resolución para señales de control precisas.
Si bien desde el punto de vista del hardware la cartera de MCU de GigaDevice puede satisfacer las necesidades del mercado, el uso de la robótica en el mercado industrial y de consumo también aumentará significativamente los riesgos de seguridad: los fallos frecuentes pueden tener graves consecuencias. Esto es muy similar a los desafíos de seguridad que enfrentan los vehículos de conducción autónoma. Para ello, el diseño de robots debe considerar holísticamente la seguridad funcional de todo el producto, al igual que los coches de conducción inteligente. Es necesario planificar sistemáticamente la arquitectura electrónica/eléctrica general y establecer ciertos requisitos de seguridad funcional para cada componente. Solo mediante la construcción de una garantía de seguridad integral de esta cadena se pueden lograr aplicaciones comerciales seguras y fiables.
Además de la seguridad funcional, cabe destacar también la seguridad de la información, un aspecto que suele pasarse por alto. Ningún fabricante de robots quiere que sus sistemas sean pirateados. Para resolver este problema, se requieren estándares industriales sólidos, leyes y regulaciones perfeccionadas, y la cooperación entre hardware y software, tanto en la cadena de suministro como en la cadena de suministro, para eliminar los riesgos de seguridad. Cabe mencionar que Gigadevice ha desarrollado soluciones específicas para la seguridad funcional y la seguridad de la información, garantizando así la seguridad de los chips de sus clientes.
Gigadevice se centra en la seguridad funcional (cumpliendo con estándares como IEC 61508 e ISO 10218) y ofrece paquetes de soporte integrales (Manual de Seguridad, FMEDA, bibliotecas de autodiagnóstico). También aborda la seguridad de la información con funciones de hardware específicas para proteger el código, garantizar un arranque seguro, una depuración segura y actualizaciones de firmware seguras.
En comparación con las soluciones tradicionales, que podrían utilizar buses de campo de menor rendimiento o arquitecturas menos síncronas y distribuidas, el enfoque de Gigadevice, basado en la integración de EtherCAT de alto rendimiento en sus MCU y priorizando la comunicación multieje determinista, busca satisfacer los mayores requisitos de control y la coordinación precisa que requieren los robots modernos. La empresa se posiciona como un proveedor clave de chips para la producción en masa de robots prevista para 2026.
Para ofrecer las mejores experiencias, utilizamos tecnologías como las cookies para almacenar y/o acceder a la información del dispositivo. El consentimiento de estas tecnologías nos permitirá procesar datos como el comportamiento de navegación o las identificaciones únicas en este sitio. No consentir o retirar el consentimiento, puede afectar negativamente a ciertas características y funciones.
Funcional
Siempre activo
El almacenamiento o acceso técnico es estrictamente necesario para el propósito legítimo de permitir el uso de un servicio específico explícitamente solicitado por el abonado o usuario, o con el único propósito de llevar a cabo la transmisión de una comunicación a través de una red de comunicaciones electrónicas.
Preferencias
El almacenamiento o acceso técnico es necesario para la finalidad legítima de almacenar preferencias no solicitadas por el abonado o usuario.
Estadísticas
El almacenamiento o acceso técnico que es utilizado exclusivamente con fines estadísticos.El almacenamiento o acceso técnico que se utiliza exclusivamente con fines estadísticos anónimos. Sin un requerimiento, el cumplimiento voluntario por parte de tu Proveedor de servicios de Internet, o los registros adicionales de un tercero, la información almacenada o recuperada sólo para este propósito no se puede utilizar para identificarte.
Marketing
El almacenamiento o acceso técnico es necesario para crear perfiles de usuario para enviar publicidad, o para rastrear al usuario en una web o en varias web con fines de marketing similares.