Défis dans la conception d'émetteurs-récepteurs radar pour ADAS/AD
Figure 1. Emplacement des capteurs radar dans une voiture pour une couverture à 360°.
Auteur: Marta Martínez-Vázquez, ingénieure senior en marketing produit, division marketing des produits analogiques automobiles – Renesas Electronics Europe GmbH
Les technologies modernes de communication et de détection ont révolutionné la conception des automobiles. Pour accroître la sécurité et évoluer vers la conduite autonome, les nouveaux véhicules doivent inclure des systèmes capables d'interagir avec leur environnement, leur infrastructure ou d'autres participants à la circulation pour détecter les sources potentielles de danger. Les capteurs automobiles sont donc essentiels pour améliorer la sécurité routière et atteindre des niveaux élevés de conduite autonome. Son utilisation contribuera à réduire le nombre d'accidents de la circulation et de décès sur les routes du monde entier, avec l'objectif ultime fixé par la Vision 0 : zéro décès dans les accidents de la circulation d'ici 2050.
Parmi les capteurs envisagés pour la conduite assistée et autonome, le radar s'est avéré extrêmement sûr pour les applications ADAS telles que le régulateur de vitesse adaptatif. Les applications radar devraient se développer à l'avenir, car le radar est souvent utilisé en conjonction avec d'autres technologies de détection telles que le lidar et les caméras vidéo. Les avantages et les inconvénients des différents types de capteurs sont résumés dans le tableau suivant. La conduite entièrement autonome nécessitera probablement la fusion de données obtenues à partir de différentes technologies de détection. Grâce à des capteurs répartis autour de la voiture, il sera possible d'assurer une couverture complète à 360°, créant ainsi un « cocon » de sécurité autour de la voiture. La figure 1 illustre le concept lorsque seuls les capteurs radar sont pris en compte.
Avantages et inconvénients des différentes technologies de capteurs pour les applications automobiles
AVANTAGES
CONS
Imagerie optique (vidéo)
Grand champ de vision
haute résolution
Limité par les conditions météorologiques et lumineuses.
Charge de travail de traitement élevée
Ultrasonique
Fonctionnement dans toutes les conditions météorologiques et de luminosité
très faible coût
très courte portée
Infrarouge
Fonctionnement dans des conditions de faible luminosité
plage de détection courte
lidar
Haute précision (portée, résolution et position)
Limité par les conditions météorologiques (brouillard, neige)
Il n'y a pas d'informations directes sur la vitesse.
Radar
Moins sensible aux conditions climatiques.
Longue portée de détection
Bonne résolution et estimation de la position.
Mesure d'angles complexes
Classification des objectifs complexes
Pas mature à complètement AD
Un avantage supplémentaire du radar est que les capteurs radar peuvent être facilement installés derrière des éléments de voiture courants, tels que des pare-chocs ou des emblèmes, de sorte qu'ils soient invisibles et n'affectent pas l'esthétique. La bande de fréquence de 76 GHz à 81 GHz a été acceptée par la plupart des pays comme bande de fréquence pour les radars automobiles. L'intégration physique devient plus facile avec des fréquences de fonctionnement élevées, car la taille des antennes radar sera réduite. Cependant, de nouveaux défis apparaissent avec une fréquence croissante, en raison des compromis de puissance, des pertes plus élevées et d'un impact plus important des tolérances de fabrication.
Le radar est également particulièrement adapté aux applications automobiles, car les véhicules sont de bons réflecteurs pour les ondes radar. Il peut être utilisé à la fois pour les fonctions de « confort », telles que le régulateur de vitesse automatique, ainsi que pour les applications de détection à haute résolution, ajoutant à la sécurité passive et active d'un véhicule. Les exemples incluent la détection des angles morts, l'assistance au changement de voie et l'alerte de circulation transversale arrière, la détection des piétons et des vélos à proximité du véhicule.
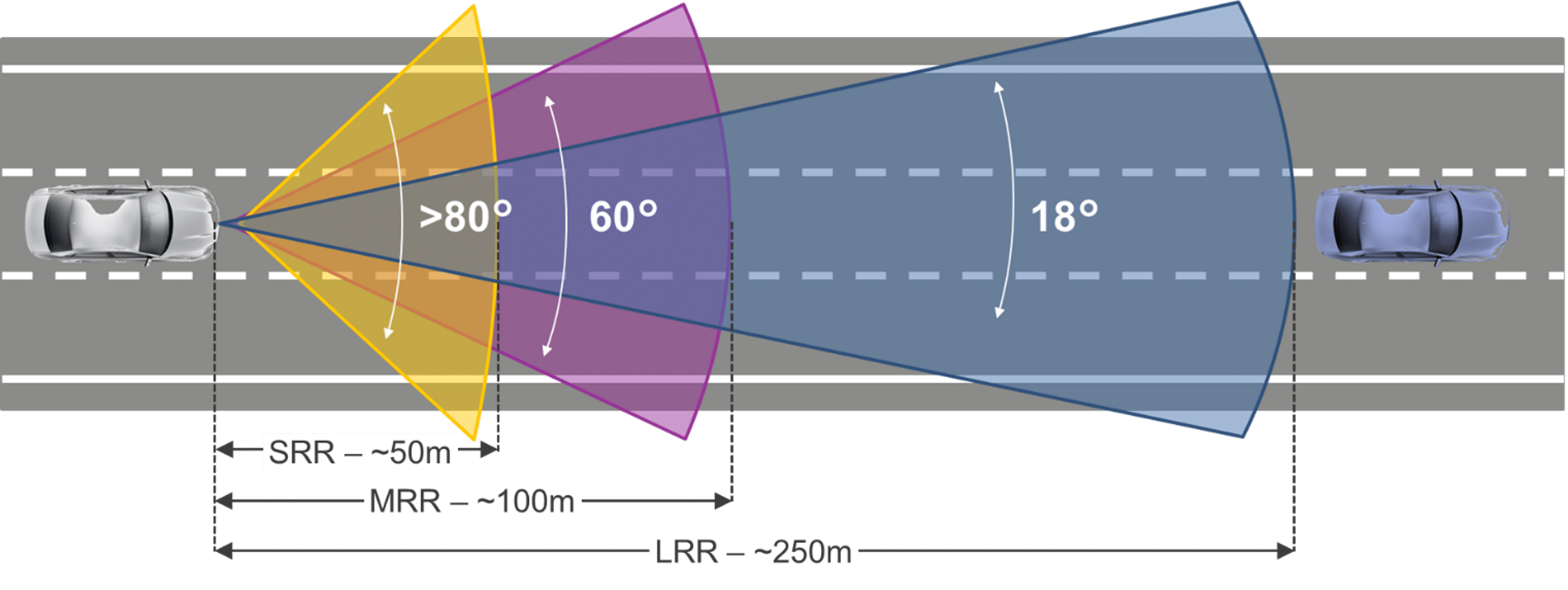
Aujourd'hui, les capteurs radar peuvent être classés en fonction de leur portée de détection, comme le montre la figure 2 ci-dessous.
Radar à courte portée (SRR) : jusqu'à 50 m avec un large champ de vision et une haute résolution
Radar à moyenne portée (MRR) : jusqu'à 100 m avec un champ de vision moyen
Radar longue portée (LRR) : 250 m ou plus de portée, avec un champ de vision plus étroit et moins axé sur la résolution
Avec le développement des nouvelles technologies, la portée devrait s'étendre au-delà de ces limites, tandis que la dimension verticale s'ajoute à la détection pour fournir une image 3D complète de l'environnement.
Figure 2 : Classification de la portée du radar automobile
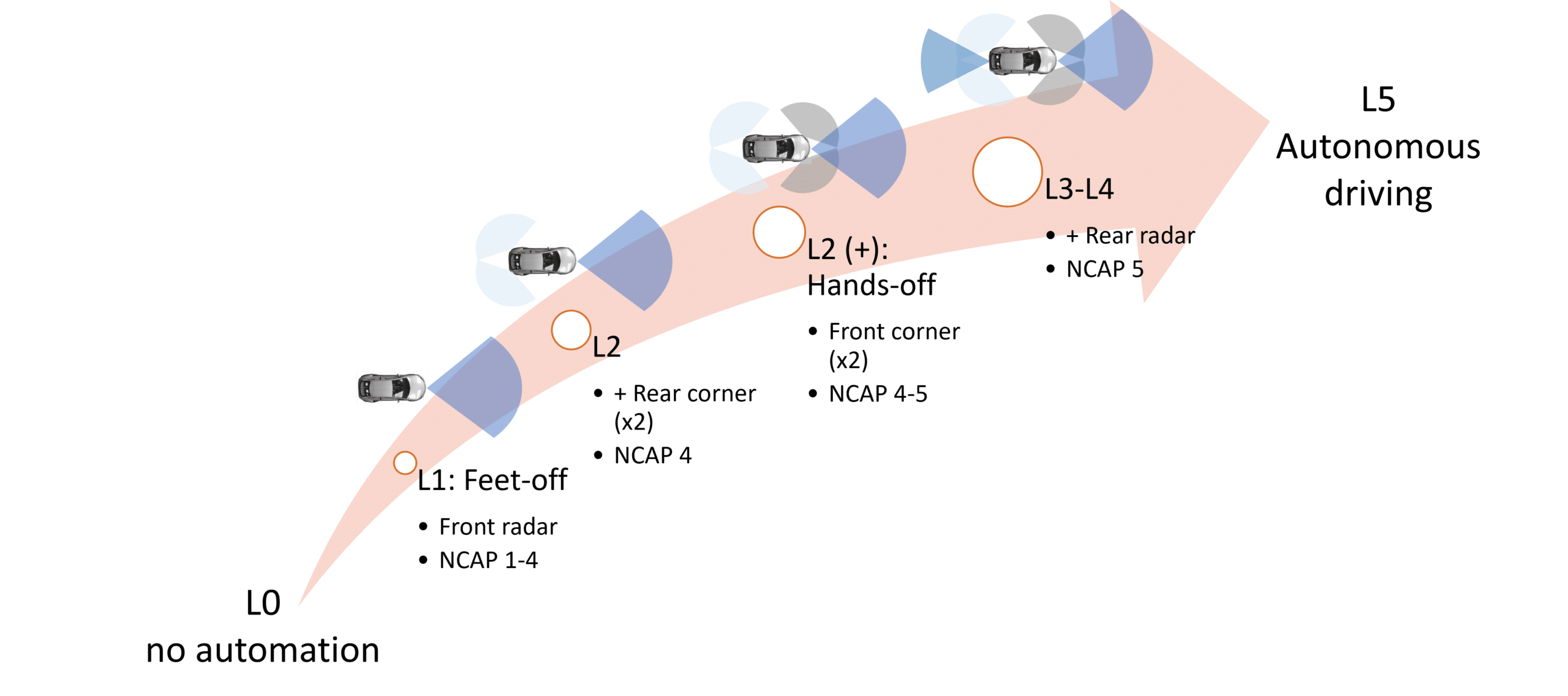
À l'avenir, plusieurs modules radar seront ajoutés aux voitures, pour passer d'une configuration radar de base avant-gardiste qui fournit une conduite autonome de base du niveau 1 au niveau 4 dans le NCAP (nouveau programme d'évaluation des voitures). Bientôt, davantage de voitures seront équipées de capteurs radar aux extrémités de la voiture pour atteindre le niveau de conduite autonome 2+ et NCAP 4-5 dans les voitures standard, et le niveau de conduite autonome 3-4 et NCAP 5 pour le segment premium ( figure 3) .
Figure 3 : Radar automobile pour différents NCAP et niveaux de conduite autonome
Cependant, la manière dont les données radar seront traitées dépendra largement de l'architecture des véhicules. Les tendances actuelles vers des performances plus élevées des unités centrales de calcul entraînent également une évolution de l'architecture E/E embarquée vers une architecture distribuée. Bien que la migration vers une architecture entièrement distribuée ne sera pas complète avant les années 2030, des implémentations partielles apparaîtront plus tôt sur le marché. Tout d'abord, certains contrôleurs de domaine seront utilisés pour des fonctions spécifiques comme ADAS. Ensuite, le nombre de contrôleurs de domaine augmentera, tandis que des contrôleurs de zone seront également introduits avant qu'une architecture E/E entièrement centralisée ne soit établie, dans laquelle l'ordinateur central du véhicule se connectera aux capteurs via les unités de contrôle de zone. Cette évolution nécessitera également d'augmenter la capacité et la fiabilité des réseaux de véhicules, ainsi que la complexité des logiciels.
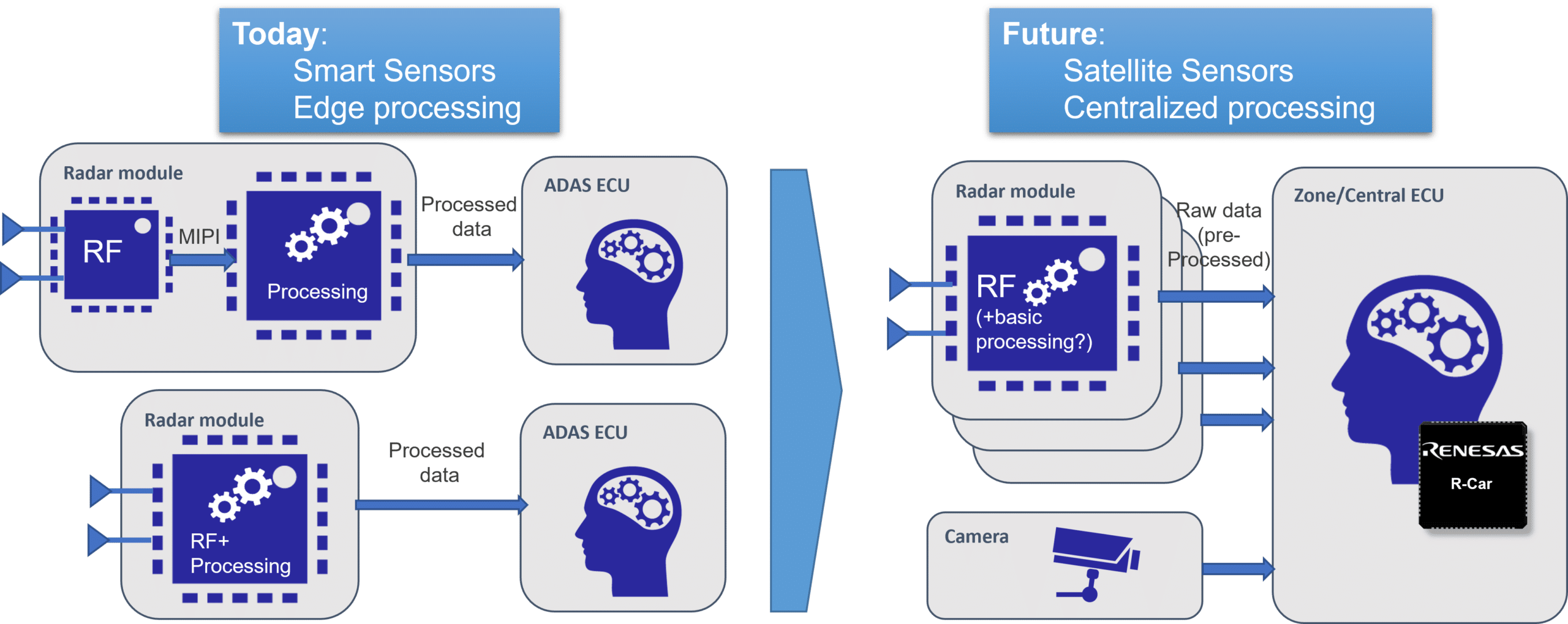
Avec l'introduction de nouvelles architectures E/E, une partie du traitement radar pourrait être déchargée du module de capteur radar (edge computing) vers la zone centrale ou ECU, permettant des calculs plus efficaces. Aujourd'hui, tout le traitement radar se fait en périphérie, avec des « capteurs intelligents », comme le montre la figure 4 ci-dessous. Cela signifie que plusieurs modules radar indépendants sont répartis autour du véhicule, chacun avec ses propres capacités d'émetteur-récepteur et de traitement. Les données traitées, généralement la liste d'objets, sont ensuite transférées vers un calculateur ADAS pour un traitement ultérieur et éventuellement une fusion avec les données d'autres capteurs. Avec une bonne répartition des capteurs dans la voiture, l'environnement du véhicule peut être correctement perçu et les obstacles peuvent être identifiés.
Figure 4 : Capteurs intelligents avec traitement des bords
Avec le développement des architectures informatiques centralisées, il est probable que le traitement des données de certains modules radar soit déplacé du capteur radar vers une unité de traitement distante, soit un calculateur de zone, soit directement vers le calculateur central du véhicule. Les modules radar eux-mêmes seraient alors moins "intelligents" et n'effectueraient qu'un traitement limité des signaux radar reçus. Par exemple, le module déterminera la distance aux différents objets et fournira les profils de distance au processeur distant. Ensuite, il recevra les données prétraitées de différents modules radar satellite et effectuera les étapes de traitement restantes pour chaque ensemble de données, pour générer la liste des objets avec leurs caractéristiques respectives (distance, direction et vitesse), pour créer l'image complète de la environs. . Les résultats obtenus seront ensuite fusionnés ou combinés avec les résultats obtenus à partir d'autres capteurs. Cette nouvelle configuration multi-capteurs fournira la précision nécessaire et supprimera les redondances pour permettre des niveaux élevés de conduite autonome, comme le montre la figure 5 ci-dessous.
Figure 5 : Exemple d'architecture radar avec modules satellites et traitement à distance sur des calculateurs basés sur des zones
Dans les premières implémentations de cette architecture centralisée, le prétraitement des différents capteurs radar peut être transféré vers des ECU de zone ou centraux à l'aide de la dorsale Ethernet de la voiture. Lorsqu'une définition plus élevée est nécessaire et que la quantité de radar est trop importante, comme pour l'imagerie ou le radar prospectif, le traitement radar peut toujours être effectué sur le capteur lui-même pour réduire la quantité de données à transférer. .
Le traitement centralisé des données des capteurs radar distants offre un large éventail d'avantages. Premièrement, les modules radar eux-mêmes deviennent moins complexes, économisant ainsi de la taille et du coût, et réduisant les problèmes de dissipation thermique. Les réparations et les mises à niveau, matérielles et logicielles, deviennent plus faciles.
Deuxièmement, l'utilisation du réseau existant de la voiture, c'est-à-dire la dorsale Ethernet, réduit également les coûts et le poids du câblage. De plus, les données transférées via Ethernet seront disponibles dans un format facilitant leur stockage et leur utilisation.
Enfin, le traitement des données dans les unités de contrôle du véhicule ouvre la porte à une plus grande efficacité et à des opérations plus sophistiquées et complexes. Les capacités de détection peuvent être améliorées en mettant en œuvre la fusion de données avec des informations obtenues à partir d'autres technologies de détection, telles que des caméras ou un lidar. L'apprentissage automatique et l'intelligence artificielle peuvent être envisagés pour la détection et la prédiction avancées, permettant des niveaux plus élevés de conduite autonome.
Le traitement en périphérie et l'informatique centralisée devraient coexister pendant quelques années. La migration vers des architectures E/E avec calcul centralisé nécessitera l'accès à des liaisons à haut débit dans tout le véhicule, ce qui peut conduire à l'utilisation de normes différentes pour l'échange de données. Dans tous les cas, des mesures de sécurité supplémentaires sont nécessaires pour garantir l'intégrité et la sécurité des données transférées. L'augmentation du nombre de modules radar dans la voiture elle-même et dans d'autres véhicules, tous transmettant et recevant des ondes radio, peut également entraîner des problèmes d'interférence qui devront être résolus.
Renesas travaille à fournir des solutions de pointe pour les véhicules du futur. Renesas vient de présenter son premier émetteur-récepteur radar à ondes millimétriques pour automobile, le RAA270205, afin d'étendre ses solutions de détection pour ADAS. Renesas vise à fournir des composants innovants pour les modules radar avec des émetteurs-récepteurs radar pour les applications d'imagerie, de traitement central et d'imagerie, ainsi que des calculateurs basés sur la série R-Car Gen4.
Nous utilisons des cookies pour optimiser notre site Web et notre service.
Fonctionnel
Toujours actif
Le stockage ou l'accès technique est strictement nécessaire dans le but légitime de permettre l'utilisation d'un service spécifique explicitement demandé par l'abonné ou l'utilisateur, ou dans le seul but d'effectuer la transmission d'une communication à travers un réseau de communications électroniques. .
préférences
Le stockage ou l'accès technique est nécessaire dans le but légitime de stocker des préférences non demandées par l'abonné ou l'utilisateur.
statistiques
Le stockage ou l'accès technique qui est utilisé exclusivement à des fins statistiques.Stockage ou accès technique utilisé exclusivement à des fins statistiques anonymes. Sans exigence, conformité volontaire de votre fournisseur de services Internet ou enregistrements supplémentaires d'un tiers, les informations stockées ou récupérées uniquement à cette fin ne peuvent pas être utilisées pour vous identifier.
Stratégie
Le stockage ou l'accès technique est nécessaire pour créer des profils d'utilisateurs afin de diffuser de la publicité ou pour suivre l'utilisateur sur un ou plusieurs sites Web à des fins de marketing similaires.